FANUC Robot
注意: 除了下面的设置信息,另请参阅 Visual Components Academy上的视频课程(英文)。
1. 插件简介
Fanuc Robot插件允许您在模拟期间连接到 Fanuc机器人控制器并交换数据。例如,在虚拟或物理Fanuc控制器中 运行的程序可以在模拟期间驱动Fanuc机器人的 关节、从传感器读取数据,并设置拾取 和放置产品的输出。
插件与Visual Components Premium 4.10的连接功能相关联, 可以连接到一个或多个Fanuc机器人控制器。简化的工作流程 如下:
- 添加服务器
- 连接到服务器
- 映射变量
- 运行模拟
2. 读写支持
读写表
| 类型 | 读 | 写 | 备注 |
| 机器人控制器数字和模拟输入和输出 |
是 |
是 | |
| 机械臂数字输入和输出 |
是 |
是 | |
| 基本类型(布尔值、整数、实数、字符串) 的系统变量 |
是 |
是 |
值的范围受到限制。此外,字符串长度 受系统变量的最大长度限制 |
| 来自任何motion group的当前关节值 |
是 |
否 |
模拟至服务器 方向 中的成对变量:
当数字或模拟输入和输出(IO)配对时,这些配对的 IO在机器人控制器上会自动设置为simulated 模式。
- 通过 API写入的值现在已应用于机器人程序,并对其可见
- 建议使用基于事件的 更新模式
- 在模拟运行之前, IO不会自动重置为初始状态,用户需要 通过示教器进行重置
- Roboguide有用于查看和设置IO值的 用户界面。这不适用于 simulated 模式下的IO, 但是示教器可以显示和设置模拟IO的状态。
服务器至模拟方向中的 成对变量:
只支持循环更新。如果服务器至模拟传输 方向是设置为基于事件的模式,您将在输出面板中 收到连接错误消息。
可以使用FANUC API/PC DK的Scattered Access 功能来优化循环读写。
- 在使用单个请求时, 自动读取和写入尽可能多的 变量
插件为每个变量组使用一个通信线程,以降低 延迟。请注意,如果同一变量与超过一个变量配对, 则该变量可能会变更多次或丢失。这是因为 更新可能会重叠,或撤消另一次更新中的更改。
与本地虚拟机器人控制器(Fanuc Robot Server)的 通信速度相当高效。然而,速度可能会根据 模拟负载和机器人控制器而变化。
3. 要求
要能够连接,Visual Components Premium和Fanuc Robot Server软件 必须安装在同一台机器上。请参见以下选项:
选项1-Visual Components Premium 4.10 Premium + Fanuc PC DK:
- PC DK选项 #A08B-9410-J535(Fanuc Robot PC Developer’s Kit)
- PC DK includes Fanuc Robot Server
选项2-Visual Components Premium 4.10 Premium + Fanuc Robot Server:
- Robot Server 选项 # A08B-9410-J536(Fanuc Robot PC Developer’s Kit Runtime Library)
选项3-Visual Components Premium 4.10 Premium + Fanuc:
- Roboguide (A08B-9410-J688)
- PC DK 选项 # A08B-9410-J535 (Fanuc Robot PC Developer's Kit) / Robot Server 选项 # A08B-9410-J536
请注意,Fanuc机器人控制器需要PC界面选项, 以支持与插件的连接。
4. 设置
注意: 除了下面的设置信息,另请参阅 Visual Components Academy上的视频课程(英文)。
- 请检查您的主机是否符合要求。
- 访问Fanuc控制器。
插件连接到机器人控制器,因此应该可以 通过直接网络连接(IP地址)或机器人邻居访问虚拟 或物理机器人控制器。例如,只要在 Fanuc RoboGuide中打开一个项目,同时运行虚拟机器人控制器, 便已足够。 - 在Visual Components Premium 4.10中, 添加带有插件的新服务器,并连接到控制器。
提示:如果您使用的是在RoboGuide中运行的虚拟机器人控制器, 在默认情况下,它将具有RoboGuide主机的IP地址。 - 映射变量。
例如,将机器人组件的每个自由度(DOF)/关节的VALUE属性 映射到控制器的关节。这样, 控制器就可以在3D世界中驱动机器人。
对于抓取/释放等模拟动作, 请将这些动作的机器人组件的输出映射到将用于这些动作的 控制器的IO。 - 运行模拟。
模拟以启动数据交换。请注意,在已连接的 变量面板中,已准备的 值列可用于设置测试值。
5. 错误处理
- 如果与控制器的 连接断开,数据交换将会停止。在这种情况下, 预期插件会从控制器收到事件。
- 在浏览 连接的控制器的变量(数字输入、数字输出等)期间, 所引发的任何异常都将会被捕获和记录到错误日志文件中, 并返回一组空的树节点以进行 处理。这些异常将会导致机器人 控制器的变量不在 创建 变量对 编辑器中显示。
- 如果与控制器的 连接断开,请重新连接到控制器。
- 如果所连接控制器 的服务器结构为空,或最新 数据没有在 创建变量 对 编辑器中显示,请尝试重新连接到控制器, 并重新加载服务器结构。如果这不起作用,请禁用/重新启用 变量组。
- 系统变量 是根据控制器的需求逐级加载。
- 浏览 整个系统变量结构可能需要5-10分钟。请注意, 有数千个系统变量。如果 在主动浏览期间连接断开, 则每当Visual Components Premium 4.10 尝试访问子节点时,每个级别的浏览将会分别失败。当您尝试访问每个已发现节点的未见子节点时, 每个节点都将产生一个异常,该异常会被记录到 错误日志文件。例如,这可能会导致有100个异常被记录下来。
- 当浏览发现错误时, 您不会收到单独的错误消息。树可能不完整, 一些异常将会记录在错误日志文件中。请注意, 连接断开时,会向输出窗口发出错误消息, 不预期会有其他错误。
对机器人程序进行后处理
后处理器
如果您需要将机器人程序从 Visual Components 模型转换为本地控制器,则可使用后处理器。
注意:后处理器可用于以下产品:
- Visual Components Premium
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
有关使用 Visual Components OLP 产品进行后处理的更多信息,请参阅 转换机器人程序。
要为真正的机器人控制器转换机器人程序,请执行下列操作:
- 点击要转换程序的机器人(或其他设备)。
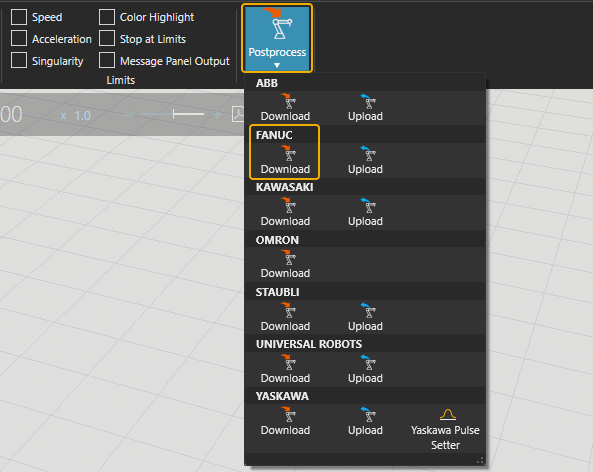
- 点击程序功能区工具中的“后处理”选项。
- 在正确的机器人品牌名称下点击“下载”。
- 浏览要保存程序文件的文件夹,并为该文件命名
-
点击“保存”
该文件可被传输至机器人控制器
注意:在真正的机器人中,仅运行从校准模型转换过来的机器人程序。否则,在执行程序时可能会出现不可预测的碰撞和错误。
若要了解更多信息,请在Visual Components OLP Extranet上查看 Visual Components Robotics OLP 机器人品牌专用手册。