Robotik
Eine Verhaltensweise vom Typ Robotik wird verwendet, um Roboterprogramme zu teachen und auszuführen.
Typen
| Name | Beschreibung |
| Basis-Container | Bietet einen logischen Container für das Hinzufügen und Bearbeiten von Frame-Features, die als Basis-Frames genutzt werden, die als Basiskoordinatensystem fungieren. |
| Robotersteuerung | Definiert einen Roboter und seine Konfiguration, z. B. seine Kinematik, Gelenke, Geschwindigkeit und Beschleunigung. |
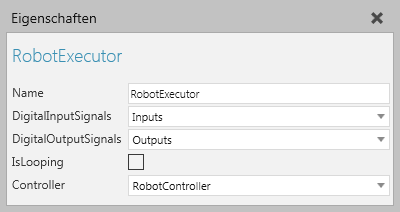
| Roboter-Exekutor | Bietet einen logischen Container und Exekutor für ein Roboterprogramm. |
| Servosteuerung | Definiert einen Servo und seine Konfiguration, z. B. seine Gelenke, Geschwindigkeit und Beschleunigung. |
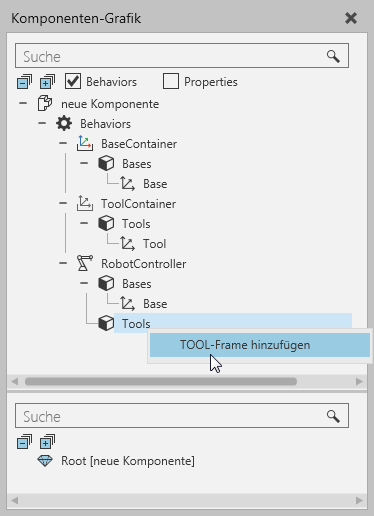
| Werkzeug-Container | Bietet einen logischen Container für das Hinzufügen und Bearbeiten von Frame-Features, die als Werkzeug-Frames genutzt werden, die als Werkzeugbezugspunkt (Tool Center Point: TCP) fungieren. |
Basis und TCP
Bei der Arbeit mit Basis- und Werkzeug-Frames müssen Sie das Panel Komponentendiagramm und Kontextmenübefehle verwenden, um die Basis- und Werkzeugelemente einiger Robotik-Verhaltensweisen zu bearbeiten. In der Regel müssen Sie die Basis- und Werkzeug-Container einer Komponente, die über eine Robotersteuerung verfügt, nicht verwenden, da diese Verhaltensweise ihre eigenen Basis- und Werkzeug-Frame-Sammlungen hat.
Programmausführung
Bei der Modellierung eines Roboters sollten Sie eine Robotersteuerung verwenden, zusammen mit einem Roboter-Exekutor, um das Programm des Roboters zu teachen, zu bearbeiten und zu simulieren.
Dennoch müssen die Gelenke und die Knotenstruktur eines Elements korrekt definiert werden.
Knotenhierarchie
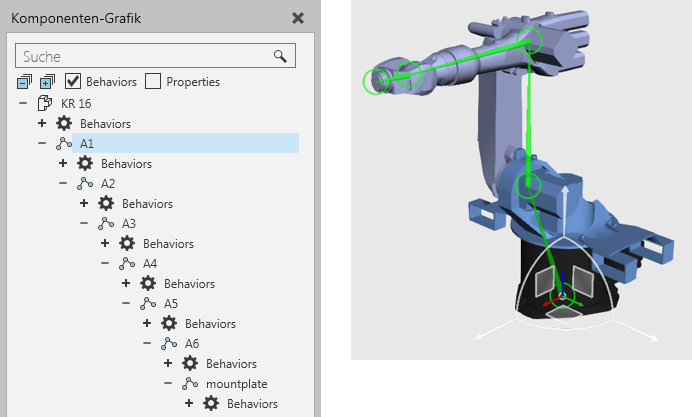
Der Befehl Struktur anzeigen kann verwendet werden, um die Knoten-/Verbindungsstruktur eines Roboters sowie seine Freiheitsgrade anzuzeigen. Der Ort jedes einzelnen Knotens wird als farbiger Ring angezeigt: Schwarz ist der Wurzelknoten, Gelb ist ein verfügbarer Knoten und Grün ist der ausgewählte Knoten. Die Knoten-Offsets werden als cyanfarbene Knochen dargestellt, die von einem übergeordneten Knoten zu allen ihm untergeordneten Knoten zeigen. Die Gelenkachse jedes Knotens wird als farbiger Pfeil dargestellt: Rot ist die X-Achse, Grün ist die Y-Achse und Blau ist die Z-Achse.

In einigen Fällen kann ein ausgewählter Knoten ein Gelenk oder einen parametrischen Offset vom Typ Benutzerdefiniert haben, so dass die interaktive Manipulation des Knotens begrenzt oder deaktiviert ist.
Zuweisung von Gelenken
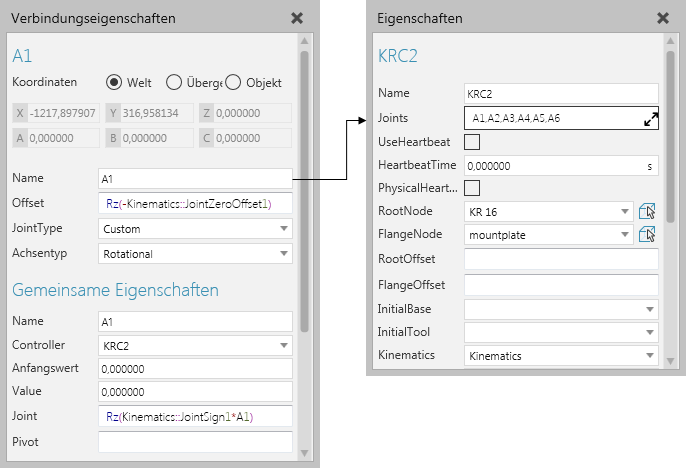
Gelenke werden in Knoten definiert und dann einer Robotersteuerung zugewiesen. Wenn ein Gelenk einer Roboter- oder Servosteuerung zugewiesen und von diesen angetrieben wird, werden ihm automatisch zusätzliche Eigenschaften hinzugefügt. Bei der Definition eines Gelenks möchten Sie eventuell auf die kinematischen Eigenschaften, die von einer Robotersteuerung verwendet werden, sowie auf andere Eigenschaften in einer Komponente verweisen. So werden beispielsweise häufig Vektoreigenschaften verwendet, um die Größenordnung/Länge von Gelenk-Offsets zu definieren.
Tipps:
- Die Gelenksdefinition eines Knotens wird verwendet, um diesen in der 3D-Welt interaktiv zu machen; dadurch ist es nicht notwendig, eine Jog-Info-Verhaltensweise zu verwenden.
- In den meisten Fällen sollten Sie das Datenblatt eines Roboters konsultieren, wenn Sie ihn als eine Komponente modellieren. Dadurch wird auch schneller klar, welche Eigenschaften im Zusammenhang mit einer Komponente erstellt und genutzt werden sollten. In der Regel würden Sie Eigenschaften, die für einen Benutzer nicht sichtbar sein bzw. nicht durch ihn bearbeitet werden sollten, im Panel Eigenschaften ausblenden/verbergen.
- Andere Komponenten für vergleichbare Roboter können als Vorlage für das Erstellen neuer Roboter verwendet werden. In einem solchen Fall würden Sie eine CAD-Datei importieren, die neue Geometrie in der Vorlage platzieren und dann die alte Geometrie löschen, die Gelenkdefinitionen sowie andere Verhaltensweisen und Eigenschaften in der Vorlage anpassen, einen Test durchführen und Ihre Arbeit dann als neue Komponente speichern.
Wenn für einen Roboter Gelenke importiert/exportiert werden müssen, verwenden Sie hierfür Verhaltensweisen vom Typ Schnittstelle.
E/A und Signalzuordnung
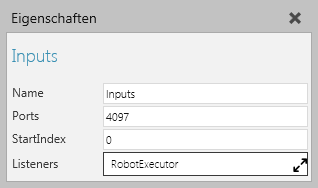
Die E/A eines Roboters werden unter Verwendung Boolescher Signalzuordnungs-Verhaltensweisen definiert, die von einem Roboter-Exekutor mitgehört und referenziert werden. In der Regel hat jeder Ein- und Ausgang eines Roboters ca. 4097 Ports, abhängig vom Robotermodell in der Realität.
Für die Verbindung von Signalen mit den E/A-Ports eines Roboters, aktivieren Sie die Signalumschaltung und verwenden Sie die Verbindungseditoren von Robotern und anderen Komponenten, um Signale miteinander zu verbinden.
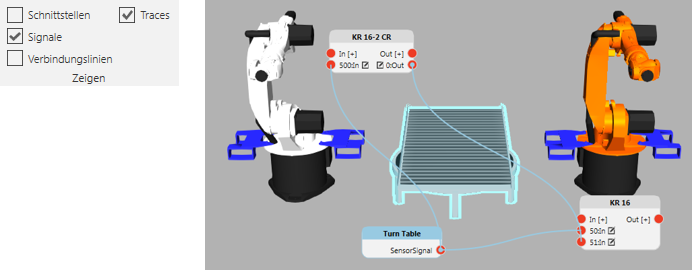
Für die Signalisierung von Aktionen in einem Roboter, beispielsweise Greifen und Loslassen, verwenden Sie Binärausgabe festlegen-Anweisungen in einem Roboterprogramm, um den Wert von E/A-Signalen, die den ersten 16 Werkzeug-Frames einer Robotersteuerung zugewiesen sind, zu schreiben.
- Die Signale 1 bis 16 sind vordefinierte Signale für Greif- und Loslass-Aktionen.
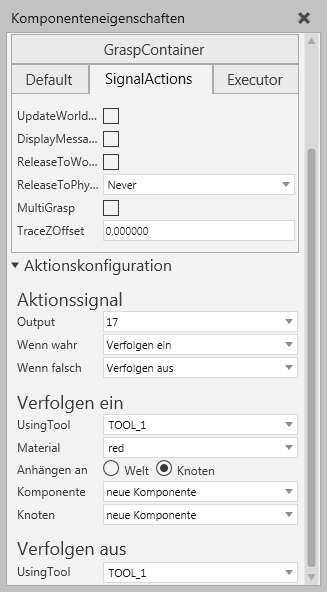
- Die Signale 17 bis 32 sind vordefinierte Signale für das Tracing von Roboterbewegungen zu und von Roboterpositionen.
- Die Signale 33 bis 48 sind vordefinierte Signale für Werkzeug-Montage- und -Demontage-Aktionen, bei denen eine Werkzeugkomponente an einem Knoten in einem Roboter befestigt ist.
Damit Aktionssignale funktionieren, muss ein Roboter über eine Aktionsskript-Verhaltensweise verfügen. In der Regel brauchen Sie Aktionssignale nicht zu bearbeiten; bearbeiten Sie stattdessen den Ort der zugeordneten Werkzeug-Frames und fügen Sie die benötigten Anweisungen einem Roboterprogramm hinzu. Für alle Fälle gilt, dass Sie niemals die Skripteigenschaft einer Aktionsskript-Verhaltensweise manuell bearbeiten müssen, und es wird empfohlen, nur den Aktionskonfigurationseditor im Panel Eigenschaften zu verwenden.
Hinweis: Die Signale 1 bis 48 sind in den meisten Roboterkomponenten für Aktionssignale reserviert. Daher wird empfohlen, die Signale ab 100 für die Verbindung von Signalen mit anderen Komponenten zu verwenden. Basis-Frames können Aktionssignalen zugeordnet werden.