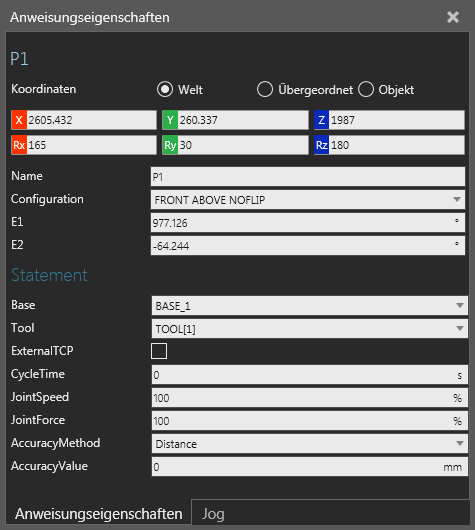
Jog
Das Panel Jog ermöglicht in Verbindung mit dem Jog-Befehl das Manipulieren, Konfigurieren und Teachen eines Roboters in der 3D-Welt.
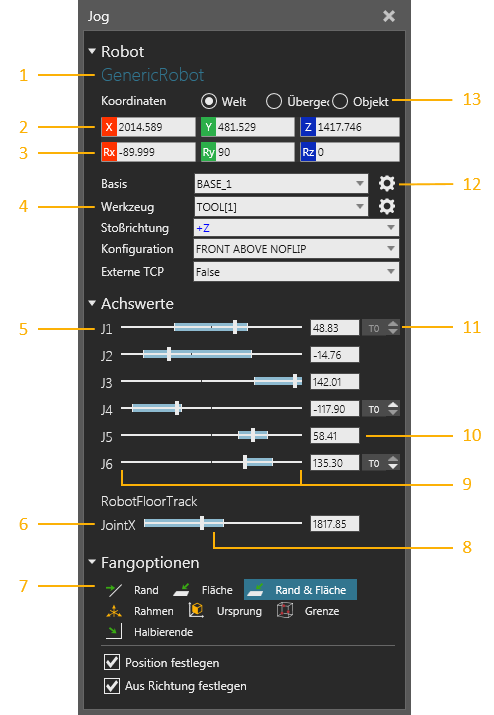
| 1. | Name des ausgewählten Roboters |
| 2. | Positionswerte für TCP/End-of-Arm |
| 3. | Ausrichtungswerte für TCP/End-of-Arm |
| 4. | Konfiguration von Roboter und Manipulator |
| 5. | Gelenke des ausgewählten Roboters |
| 6. | Angeschlossene externe Achsen |
| 7. | Fangen-Optionen für Manipulator |
| 8. | Von Gelenk im aktuellen Zustand erreichte Min- und Max-Werte |
| 9. | Min- und Max-Bereich des Gelenks |
| 10. | Gelenkwert |
| 11. | Schaltfläche für schrittweise Änderung des Gelenkwertes |
| 12. | Ausgewählte aktive Basis/aktives Werkzeug in 3D-Welt |
| 13. | Koordinatensystem |
Manipulator
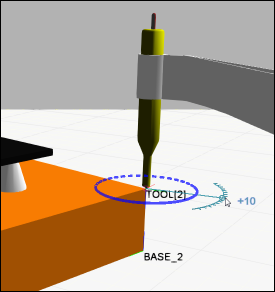
Der Manipulator eines Roboters ermöglicht die Bewegung des Roboters im Jog-Modus und das Teachen von Positionen mittels Basis- und Werkzeug-Frames. Ein Basis-Frame dient als fester Bezugspunkt im Raum zur vereinfachten Positionierung des Roboters. Allgemein gilt, dass Basis-Frames in einem Roboterwelt-Frame liegen, der sich entweder auf dem Boden oder in mittlerer Höhe des Roboters befindet. In bestimmten Fällen können Basis-Frames auch an Knoten anderer Komponenten befestigt sein. Beispielsweise ist es möglich, Basis-Frames an Paletten, Werkstücken oder Knoten einer externen Kinematik-Komponente zu befestigen, die mit einem Roboter verbunden ist.
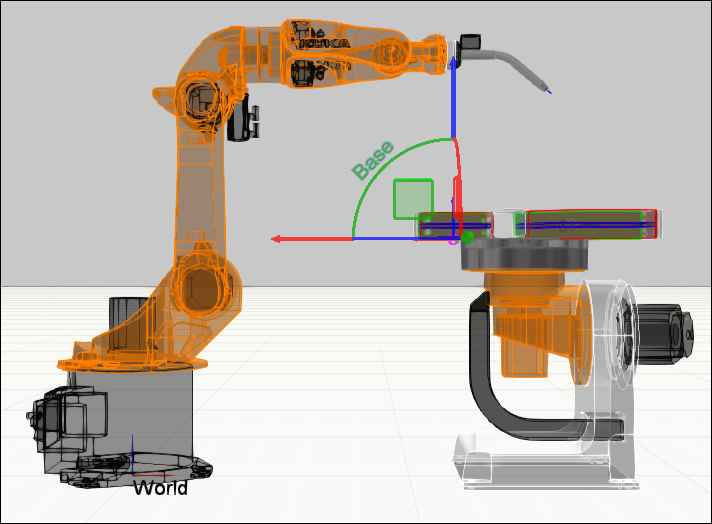
Ein Werkzeug-Frame dient als TCP (Tool Center Point, Werkzeugbezugspunkt) und wird zum Teachen von Roboterpositionen verwendet. Häufig sind Werkzeug-Frames am Flanschknoten bzw. der Montageplatte eines Roboters befestigt oder am Mittelpunkt und an der Spitze eines montierten Werkzeugs. In den meisten Fällen dient ein Werkzeug-Frame als Ursprung des Manipulators, mit dem der Roboter und das Werkzeug-Frame in der 3D-Welt verschoben werden können. Die großen Pfeile des Manipulators beziehen sich auf das aktive Koordinatensystem im Panel Jog, während sich die kleineren Pfeile auf das Werkzeugkoordinatensystem beziehen.
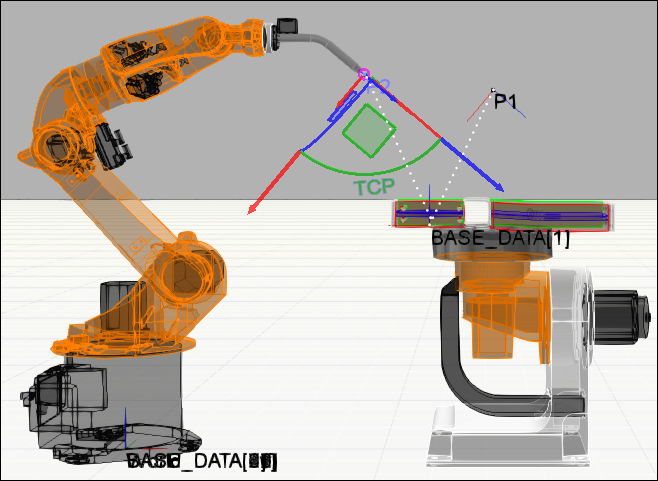
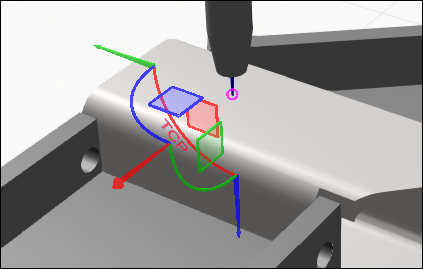
Eine Methode zum Teachen einer Position besteht darin, ein Basiskoordinatensystem zu referenzieren und den Abstand zum aktiven Werkzeug-Frame und die Ausrichtung zu berechnen. In diesen Fällen bewegt der Manipulator den Roboter und das aktive Werkzeug-Frame an diese Position. Ein Basis-Frame ist dieser Position übergeordnet. Das heißt, beim Verschieben des Basis-Frames würden auch diese und alle anderen damit verbundenen Positionen verschoben werden. Wenn Sie eine Roboterposition in der 3D-Welt oder im Panel Aufgabendiagramm auswählen, wird der Roboter an dieser Position gefangen.
Tipp: Mit dem Befehl Positionen an Welt fixieren können Sie dafür sorgen, dass Roboterpositionen in der 3D-Welt nicht verschoben werden, wenn Sie den Ort eines Roboters, eines Basis-Frames oder eines anderen durch diese Positionen referenzierten Objekts verändern. Mit dem Befehl Auswählen können Sie eine Roboterposition auswählen, ohne dass der besitzende Roboter an dieser Position gefangen wird.
In einigen Fällen kann ein Werkzeug-Frame an Knoten in anderen Komponenten befestigt und als externer TCP verwendet werden. Beispielsweise können Sie ein Werkzeug-Frame an einem stationären Werkzeug befestigen, so dass sich der Roboter an einem festen Punkt im Raum orientiert. In einigen Fällen sind die Rollen von Basis- und Werkzeug-Frames vertauscht, so dass ein Werkzeug-Frame als BASIS verwendet wird und ein Basis-Frame als TCP. In der Folge würde die Roboterposition die Ausrichtung des Basis-Frames übernehmen.
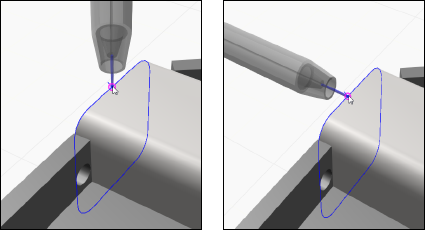
Beim Fangen mit dem Manipulator definiert die Eigenschaft Anstellachse des Roboters, wie der Roboter auf Basis der Ausrichtung des aktiven Werkzeug-Frames ausgerichtet werden soll. Eine übliche Ausrichtung für ein Werkzeug-Frame wäre beispielsweise in positiver Richtung entlang seiner Z-Achse.
In der Regel würde man die Anstellachse eines Roboters ändern, um andere Ergebnisse zu erzielen.
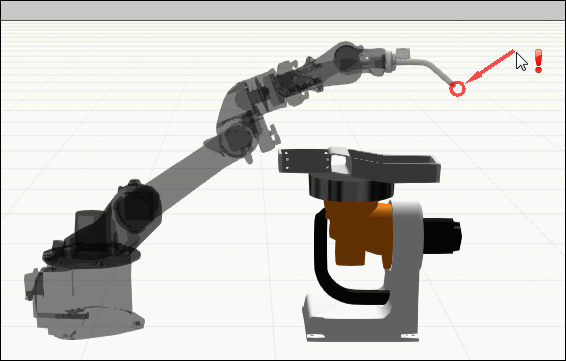
Wenn Sie versuchen, den Manipulator an einen Punkt zu verschieben, der von einem Roboter nicht erreicht werden kann, wird in der 3D-Welt eine Fehlermeldung angezeigt und mit einem Pfeil auf den Ursprung des Manipulators verwiesen.
Entsprechend wird eine nicht erreichbare Roboterposition in der 3D-Welt rot markiert.