Kollisionserkennungsdetektoren
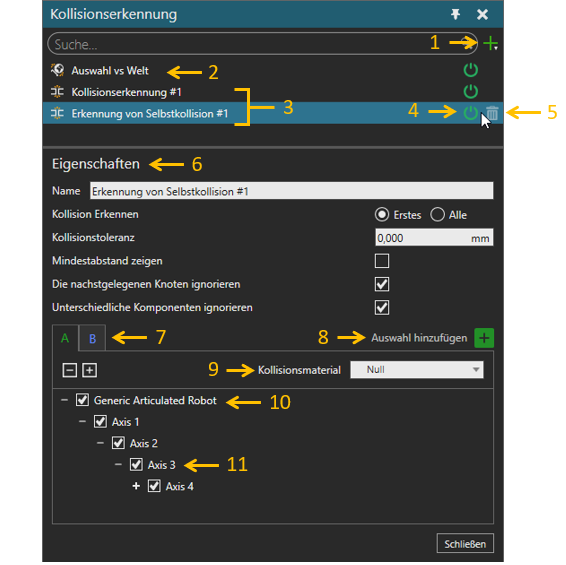
- Einen neuen Kollisionserkennungsdetektor erstellen.
- Kollisionserkennungsdetektor Ausschnitt gegen Umwelt. Dies vergleicht die ausgewählte Geometrie gegen die Geometrien in der 3D-Umwelt.
- Hinzugefügte Kollisionserkennungsdetektoren. Diese Detektoren überprüfen auf Kollisionen zwischen den Geometrien A und B.
- Ein-/Ausschalter des Detektors.
- Detektor entfernen.
- Eigenschaften
- Name Name der Kollisionserkennung.
- Kollision Erkennen
- Erstes Erste erkannte Kollision aufnehmen.
- Alle Alle erkannten Kollisionen aufnehmen.
- Kollisionstoleranz Mindestabstand der Kollisionserkennung.
- Mindestabstand zeigen Den Mindestabstand zwischen Kollisionen anzeigen.
- Ignore Closest Nodes Ignore collisions between immediate nodes that make up a parent-child pair in a component.
- Ignore Different Components Ignore collisions between nodes. Each node in different components that are attached together e.g. Gripper attached to Robot.
- Geometrien A und B zur Kollisionserkennung. A und B können eine Komponentengruppe aus der 3D-Umwelt enthalten.
- Gewählte Komponente zur Geometrie A oder B hinzufügen.
- Material der Geometrien A oder B für die entdeckte Kollision.
- Einzelkomponente in den Geometrien A oder B. Kann mit der Checkbox ein- oder ausgeschlossen werden.
- Knoten einer Komponente. Kann mit der Checkbox ein- oder ausgeschlossen werden.
Siehe ebenfalls die Kollisisionsentdeckungs- Aufgabe.