Schnelle Roboter-Anlernung
Schnelle Roboter-Anlernung ermöglicht es Ihnen, Befehle im Roboterprogramm über die Aktionen im Anlern-Überlagerungsmenü zu erstellen. Die Vorteile sind schnelles Anlernen der Roboterstellungen und vereinfachte Arbeitsabläufe zur Roboterprogrammierung in der 3D-Welt.
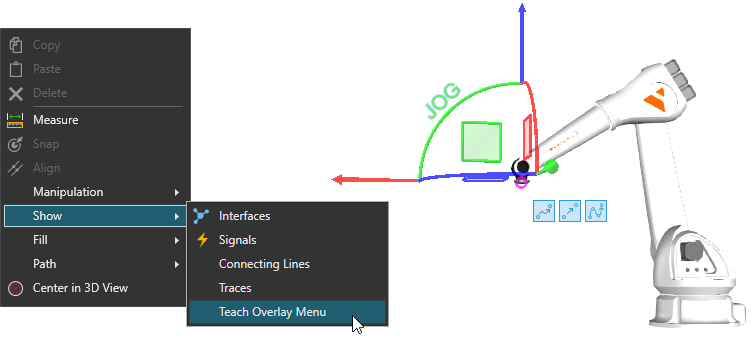
Sollten Sie das Jog-Tool verwenden, verfügen Sie über eine Reihe von Aktionen, um dem aktiven Roboter Befehle hinzuzufügen, z. B. lineare und Punkt-zu-Punkt-Bewegungen. Wenn Sie auf eine Aktion klicken, wird dem Roboterprogramm ein neuer Befehl hinzugefügt. Wenn Sie auf dieselbe Aktion klicken, wird der neue Befehl mit den Werten des zuvor hinzugefügten Befehls erstellt. Wenn Sie auf eine andere Aktion klicken, verwendet der Befehl seine Standardwerte.
Sie können die Liste der Aktionen im Anlern-Überlagerungsmenü anpassen. Sie können z. B. über eine Liste von Aktionen verfügen, um angepasste Befehle, Aufrufe von Unterprogrammen oder andere Kommandos hinzuzufügen. Zum Anpassen der Liste der angezeigten Aktionen, bearbeiten Sie bitte die Konfigurationsdatei von Visual Components Premium 4.8oder verwenden Sie PythonAPI oder .NET API.
Beispiel. Konfigurieren der Anwendungs-Konfigurationsdatei.
| <Site ItemId="VcTeachOverlayMenu"> <uxEntries> <UxItem ItemId="CloneTeachPtpMotionStatement"></UxItem> <UxItem ItemId="CloneTeachLinearMotionStatement"></UxItem> <UxItem ItemId="CloneTeachPathStatement"></UxItem> <UxItem ItemId="CreateHaltStatement"></UxItem> </uxEntries> </Site> |
Beispiel. Einen Menüeintrag per PythonAPI hinzufügen.
| from vcApplication import * cmd_name = 'RobotGrasp' title = 'myGraspAction' tooltip_name = 'Add Grasp routine' icon_name = 'rAddProgramStatement' def OnAppInitialized(): cmduri = getApplicationPath() + cmd_name + '.py' cmd = loadCommand(cmd_name, cmduri) addMenuItem('VcTeachOverlayMenu', title, 1, cmd_name, tooltip_name, icon_name) |