Einen Roboter teachen
Wenn Sie einen Roboter in der 3D-Welt teachen möchten, klicken Sie auf die Registerkarte Programm, um zur Roboter-Ansicht zu gelangen.
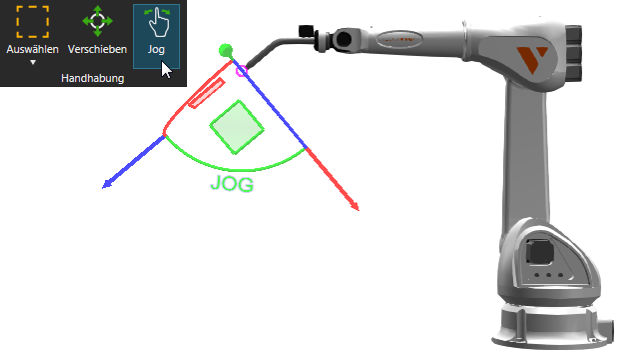
Wenn Sie mit einem Roboter interagieren und ihm Positionen teachen möchten:
- Gehen Sie auf dem Menüband
auf die Gruppe Handhabung und klicken
Sie dann den Jog-Befehl an. Dadurch können
Sie eine Robotersteuerung in der 3D-Welt auswählen, die Gelenke eines
Roboters im Jog-Betrieb bewegen und einen Manipulator verwenden, um
den Roboter relativ zum TCP (Tool Center Point, Werkzeugbezugspunk)
zu bewegen.
Wenn der Jog-Befehl aktiv ist, können Sie über das Panel Jog sowohl einen Roboter konfigurieren als auch die Einstellungen für den Manipulator des Roboters bearbeiten. So können Sie über das Panel Jog beispielsweise den aktiven TCP eines Roboters sowie auch Fangfilter für das Erkennen und Fangen eines TCP auf Arten von Orten in der 3D-Welt definieren.
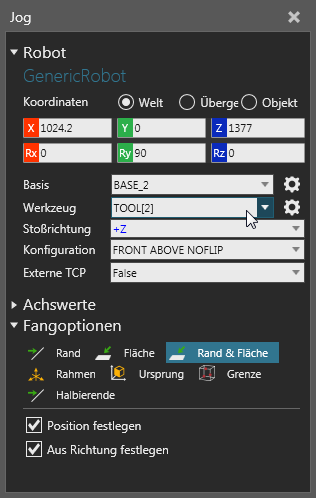
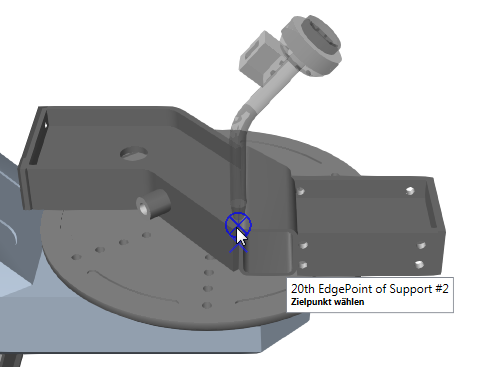
Hinweis: Die Befehle Fangen und Ausrichten funktionieren auf die gleiche Weise wie in der Layoutansicht, mit dem Unterschied, dass Sie den aktiven TCP des aktuellen Roboters fangen.
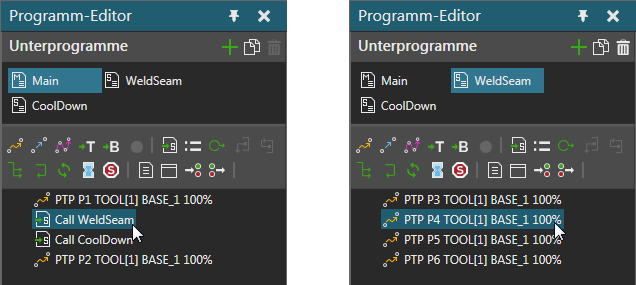
Wenn Sie auf ein Roboterprogramm zugreifen oder dieses bearbeiten möchten, verwenden Sie den Jog- Befehl um den Roboter direkt auszuwählen und um das Programm in der Programm-Editor-Leiste ansehen zu können.
Symbolleisten in einem Roboterprogramm sind in Programmen verschachtelt. Jeder Roboter verfügt über ein Hauptprogram welches verwendet werden kann um Symbolleisten auszuführen oder Unterprogramme aufzurufen.
Das Programm eines Roboters in der 3D-Welt wird automatisch mit einem Layout gespeichert.