Move Joint
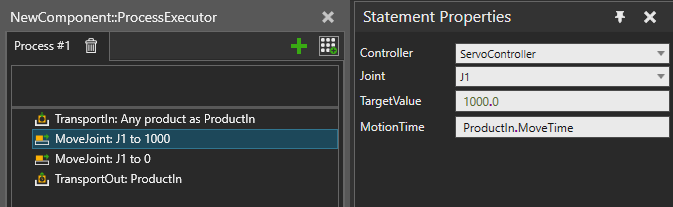
A MoveJoint statement allows you to move a joint to specified target value over time. You can move only one joint at a time. The joint must be linked to a controller and it must be in the same component where the process executor is. The statement line execution will end when the motion has been completed.
Note: The statement allows servo to move over its limits (if Stop at limits is not enabled in Program tab).
Properties
| Name | Description |
| IsEnabled | Turns on/off the execution of this statement. |
| Controller | The controller that owns the joint. This can be a servo controller or a derived controller, e.g. a robot controller. This behavior must be on the same component than the process executor that is running this statement. |
|
Joint |
The joint to move. This can be selected after selecting the controller. |
| TargetValue |
An expression for the target value. Note: Must evaluate to a Real or Integer result. See also Process Statement Expressions. |
|
MotionTime |
An expression for motion time. This can be left empty to let the controller plan the motion. Note: If not left empty, this expression must evaluate to a Real or Integer result. See also Process Statement Expressions. |