Circular Search
NOTE: This topic is only applicable to the following Robotics OLP products:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
The Circular Search type can be used to detect and correct the deviations for circular seams.
This is currently supported for OTC, ABB, Fanuc, Yaskawa, Panasonic robot brands.
Based on the type of seam an inside or outside search can be generated.
To create circular searches, follow below method:
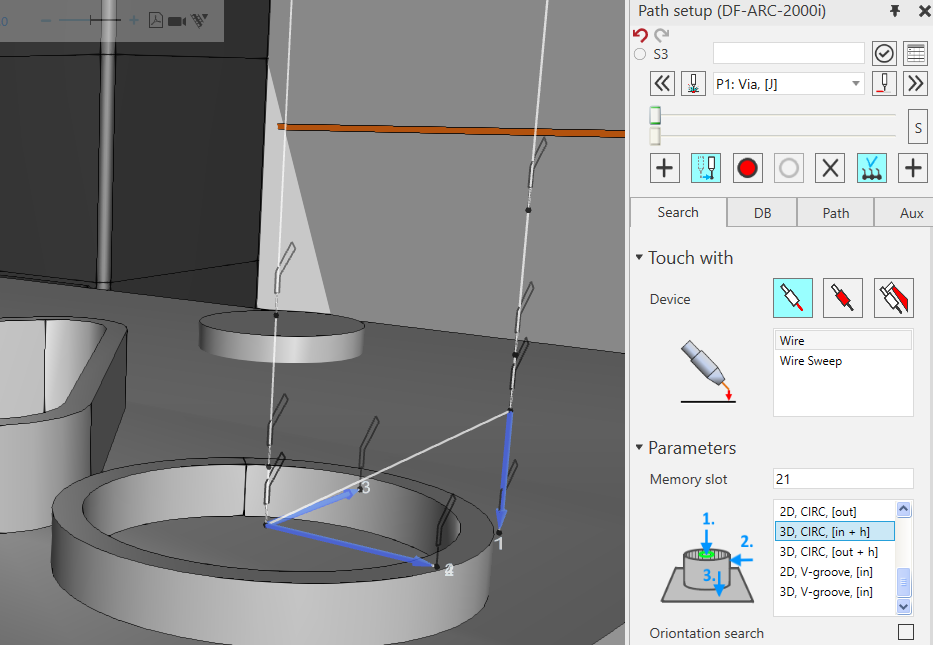
- Select the create search path from the hovel panel.
- From the Search Path setup tab, you can select the type of circular search. 2D.CIRC[IN], 2D.CIRC.[OUT], 3D.CIRC.[in+h], 3D.CIRC.[out+h] based on the seam.
- After choosing the search type you will see the preview on how to pick the touch locations on the CAD file. You will also see messages in the output on which surfaces to pick.
- Once the above step is done, the search motion paths for the robot will be generated along with the via points.
Tweaking circular search parameters
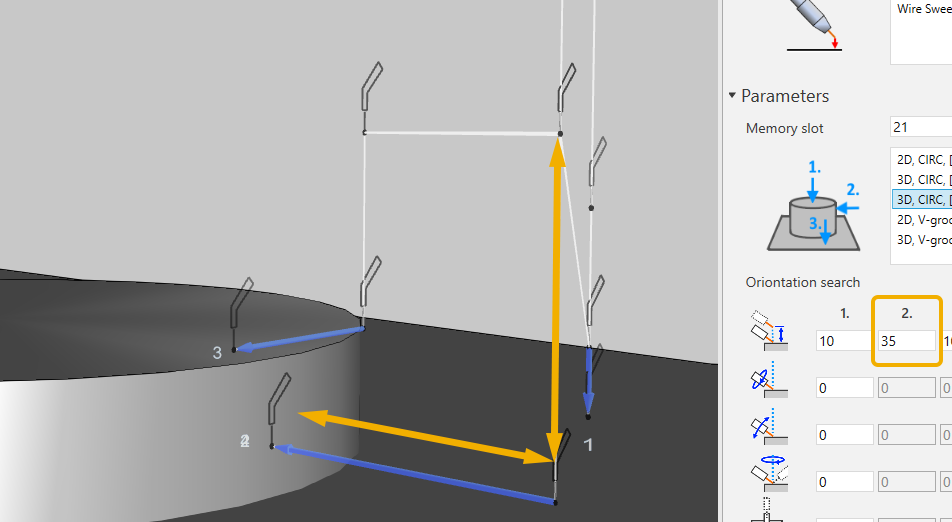
Search drive distance
1st value: Move the touch points vertically up/down along the seam.
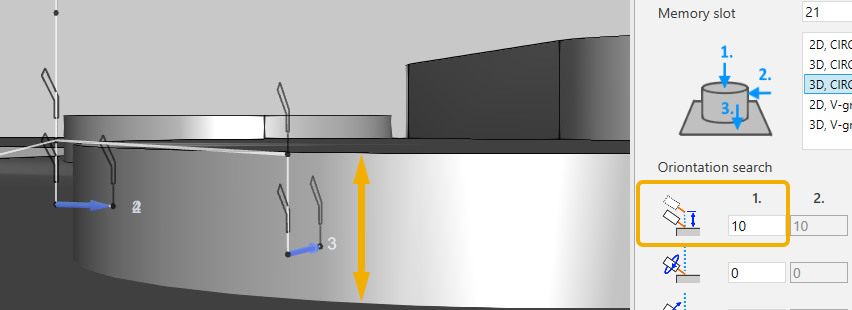
2nd value: Has no effect for inside search.
For outside search, controls the distance on how far from the touch location the searching is started. This also helps to move the via points so that the torch won’t collide while moving from one touch point to another.
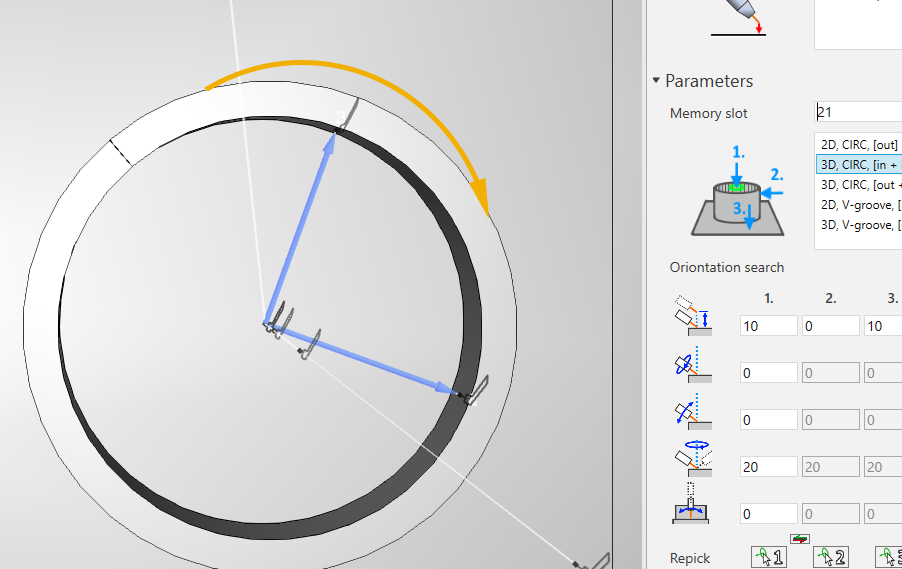
Twist angle
Allows to change the touch point location radially.
Changing Height separately
To change the height touch point separately unlock the 3rd column. If you tweak any parameter in the 3rd column, it will affect the height touch.
Advanced parameters
On creating the Circular search two advanced parameters viz, Height first and Variant are automatically created. From the drop down you can choose the value required.
Possible values are:
- HeightFirst: True/False (only in 3D circ searches)
- Variant: inside circle 1 / 2 / 3, outside circle 1 / 2
These parameters are robot brand specific. Recommended parameter values and other brand specific information:
- ABB: inside circle variant 1 (2 / 3 not tested)
- Fanuc: inside circle variant 2 or 3, outside circle variant 2
- OTC: inside circle variant 2 or 3, outside circle variant 2
- Panasonic: Only 2D circ searches. Inside circle variant 1, outside circle variant 1 or 2 (For Panasonic, SLS searches need to be enabled: Robot Settings | Path | Search: PanasonicSLS. Also other advanced parameters, ask more from your local reseller)
- Yaskawa: Inside circle variant 2 or 3, outside circle variant 2
NOTE: The effect of any change made in the advanced parameters won’t be automatically seen in the 3d world. To see the effect on changing the Height first or Variant parameters you must do below.
- For e.g., change the Variant to 3
- Now change for e.g., the wire to some value and back to original value.
- Only after this you will notice another touch point location being generated for the search path.