Fronius WireSense
NOTE: This topic is only applicable to the following Robotics OLP products:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
Fronius WireSense is currently supported for Fanuc and Yaskawa robots.
To use the WireSense do below:
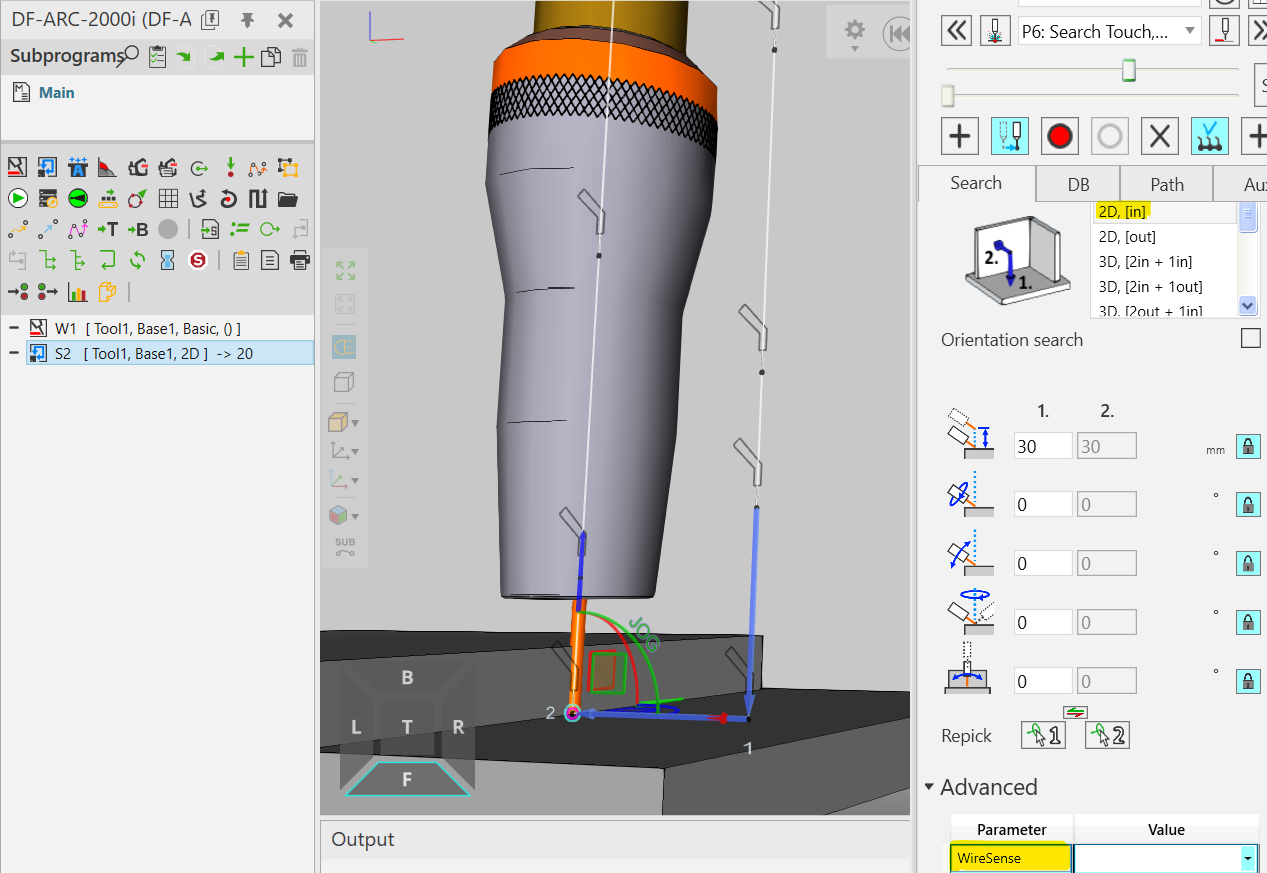
- Add a search advanced property as WireSense
Note: The parameter is case sensitive. Thus, remember to put it like this WireSense.
-
Use the Search mode as 2D in
Fanuc
Uses provided utility functions DF_SEARCH2, DF_SEARCH2_WS and WS_REAL_HEIGHT. These must be loaded to the robot controller before using WireSense search.
Shift value is saved to the same number position register as used Memory slot in the software, example PR[55]. Calculated height of the edge is calculated to the same number register, so example to R[55].
Yaskawa
Uses provided utility function that must be loaded to the robot controller before using WireSense search. Utility functions depend on robot setup and functions can be found on Translator/Search folder.
Example robot cell with only robot uses function WIRE-SENSE-R1 from the Translator/Search/RB1 folder.