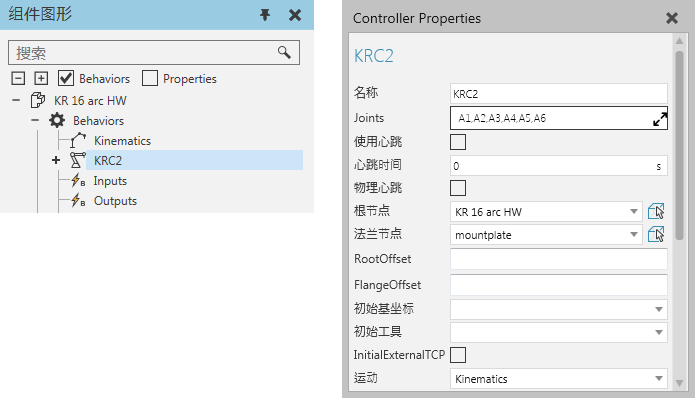
运动类型行为用于定义组件及其节点结构(例如,机器人)的向前和/或反向运动。
在所有情况下,运动类型行为都必须指定至一个机器人控制器行为以在解决运动方程式时使用。
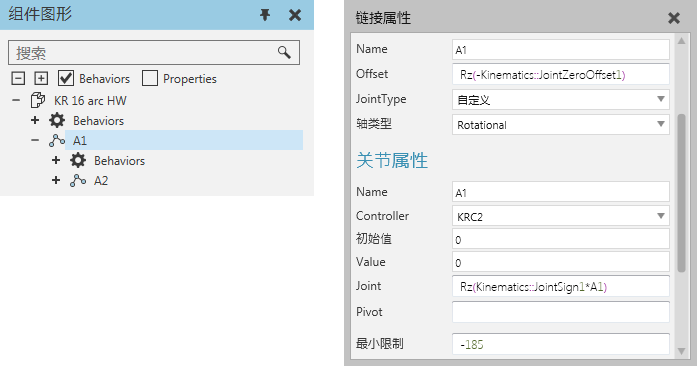
使用运动类型的行为不会取消恰当定义组件节点的需求。