机器人的
机器人类型行为用于教授和执行机器人程序。
类型
| 名称 | 描述 |
| 基坐标容器 | 提供一个充当基坐标系的逻辑容器用于添加和编辑用作基坐标框的坐标框特征。 |
| 机器人控制器 | 定义一个机器人及其配置,例如其运动、关节、速度和加速度。 |
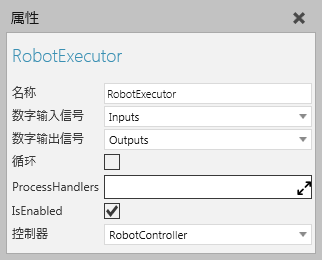
| 机器人执行器 | 为机器人程序提供一个逻辑容器和执行器。 |
| 伺服控制器 | 定义一个机器人及其配置,例如其运动、关节、速度和加速度。 |
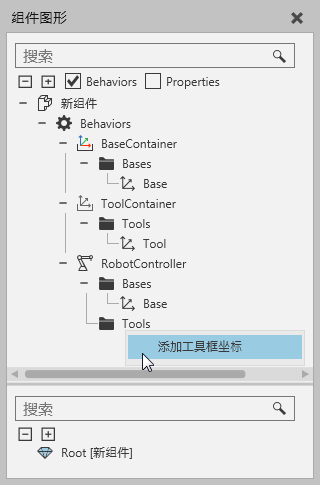
| 工具容器 | 提供一个充当工具中心点(TCP)的逻辑容器用于添加和编辑用作工具坐标框的坐标框特征。 |
基坐标和TCP
在使用基坐标和工具坐标框时,您需要使用组件图板和快捷键编辑有些机器人类型行为的基坐标和工具元素。通常来说,在拥有机器人控制器的组件中,您不需要使用基坐标和工具容器,因为该行为拥有其自己的基坐标和工具坐标收藏。
程序执行
在建模机器人时,您应使用一个机器人控制器并将其与一个机器人控制器配对以教授、编辑和模拟机器人的程序。
这不会消除恰当定义组件的关节和节点结构的需求。
节点层级
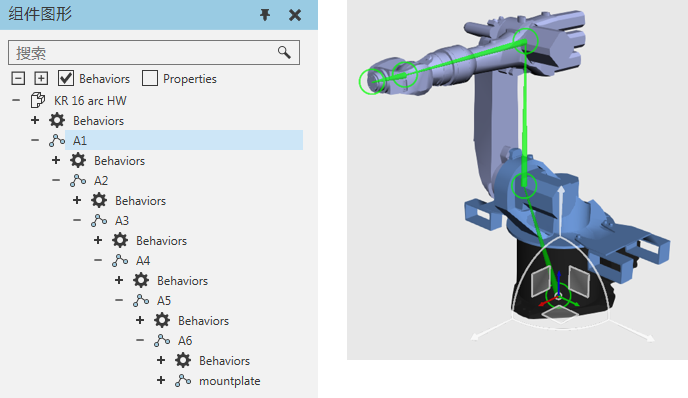
显示结构命令可用于显示机器人的节点/链接结构及其自由度。各节点的位置会作为着色环显示:黑色为根节点,黄色为可用节点,绿色为选中节点。节点偏差显示为青色骨骼状,从一个父节点指向其各个子节点。各节点的关节轴显示为着色箭头:红色为X轴,绿色为Y轴,蓝色为Z轴。

在有些情况下,选中节点可能会拥有一个自定义类别的关节或者参数偏差,因此,对节点的交互操作受限或者被禁用。
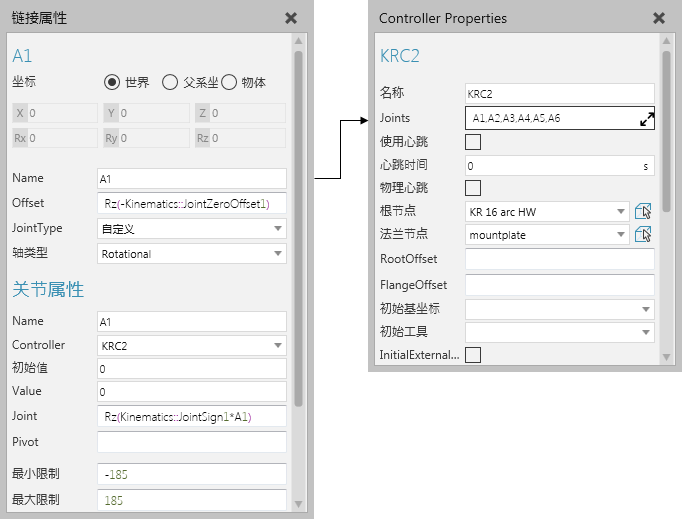
关节指定
在节点中对关节进行定义,而后指定给一个机器人控制器。关节在被指定及受机器人或者伺服控制器驱使时,会自动向关节添加额外的属性。在定义关节时,您可能会想要参考机器人控制器使用的运动属性以及组件中的其它属性。例如,矢量属性常常用于定义关节偏差的量级/长度。
小贴士:
- 节点的关节定义用于使其在3D世界中具有交互性,由此消除使用点动信息行为的需求。
- 在大多数情况下,您应在将机器人建模成一个组件时参考其数据表单。这也会加速对在组件范围内创建和使用哪些属性的了解过程。通常来说,您会在属性面板中隐藏/封装不应该显示或者用户在编辑的属性。
- 其它针对类似机器人的组件可用作创建新机器人的模板。在这些情况下,您将需要导入CAD文件,将新几何元放置在模板中,而后删除旧几何元,调整模板关节定义以及其它行为和属性,测试,而后将您的工作保存为一个新组件。
当机器人需要导入/导出关节时,使用接口类型的行为。
I/O和信号映射
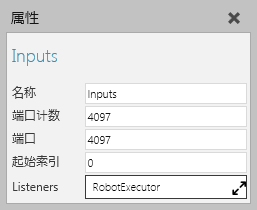
机器人的 I/O 通过使用由机器人执行器听从和参考的布尔信号映射行为定义。通常来说,机器人的输入和输出各自会拥有约4097个端口,取决于真实世界机器人模式。
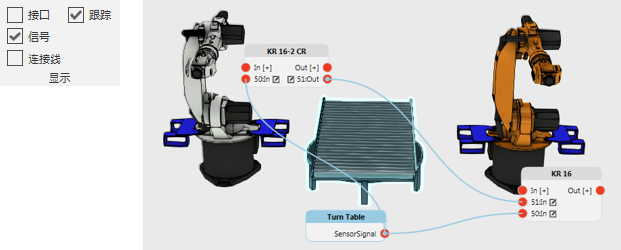
若要连接信号至机器人I/O端口,启用信号开关,而后使用机器人及其它组件的连接编辑器以将信号相互连接。
若要在机器人中发送动作信号,例如,抓握和释放动作,在机器人程序中使用设置二进制输出动作以写入映射到机器人控制器的前16个工具坐标框的 I/O 信号值。
- 信号1至16被预定义为信号抓握和释放动作。
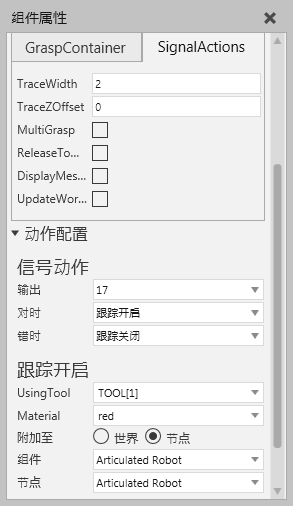
- 信号17至32被预定义为对机器人来回机器人位置运动的信号追踪。
- 信号33至48被预定义为发送工具安装和解除安装动作的信号,其中,工具组件被附加至机器人中的一个节点。
为了让动作信号能够起作用,机器人必须拥有一个动作脚本行为。通常来说,您不需要编辑动作信号,但是应该编辑映射后的工具坐标框的位置,而后添加所需的动作至机器人程序。在所有情况下,您都绝不会需要手动编辑动作脚本行为的脚本属性,建议仅使用属性面板中的动作配置编辑器。
注意: 大多数机器人组件中的信号1至48都是为动作信号预留的。因此,建议使用信号100之后的信号用于连接其它组件中的信号。基坐标框可映射至动作信号。