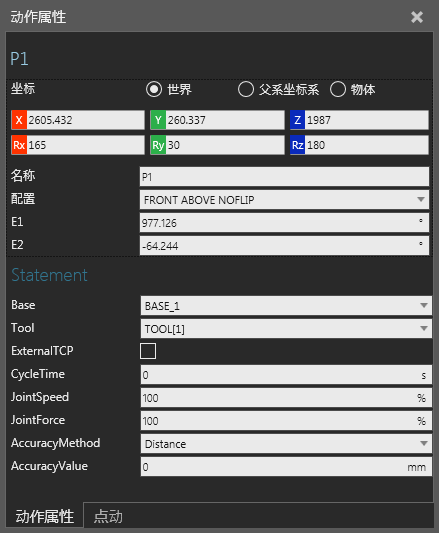
点动
点动面板与点动命令一同使用,可以让您在3D世界中操纵、配置和教授机器人。
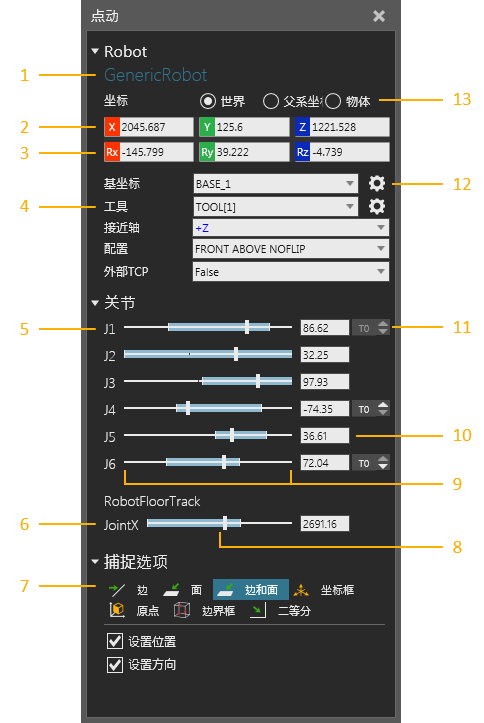
| 1. | 选中机器人的名称 |
| 2. | TCP/手臂末端的位置值 |
| 3. | TCP/手臂末端的方向值 |
| 4. | 机器人和操作机的配置 |
| 5. | 选中机器人的关节 |
| 6. | 已连接的外部关节 |
| 7. | 操作机的对齐选项 |
| 8. | 关节在当前状态中达到的最小和最大值 |
| 9. | 关节的最小和最大范围 |
| 10. | 关节值 |
| 11. | 增量关节值 |
| 12. | 在3D世界中选择活跃基坐标/工具 |
| 13. | 坐标系 |
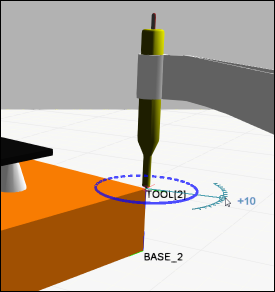
操作机
机器人的操作机可以让您点动机器人,并且使用基坐标和工具坐标框教授定位。基坐标框充当空间中的一个固定点,用于简化机器人的定位。通常来说,基坐标框位于机器人世界坐标框(位于机器人的底端或者腹部)。在有些情况下,基坐标框可附加至其它组件中的节点。例如,基坐标框可附加至货盘、工件和连接至机器人的一个外部运动组件中的节点。
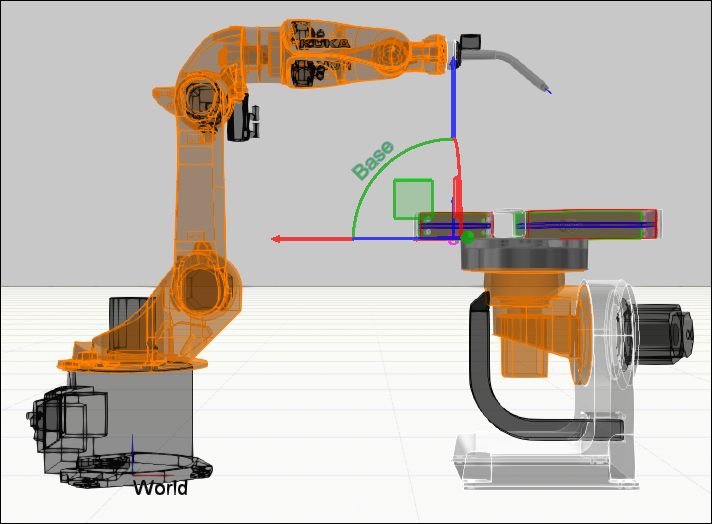
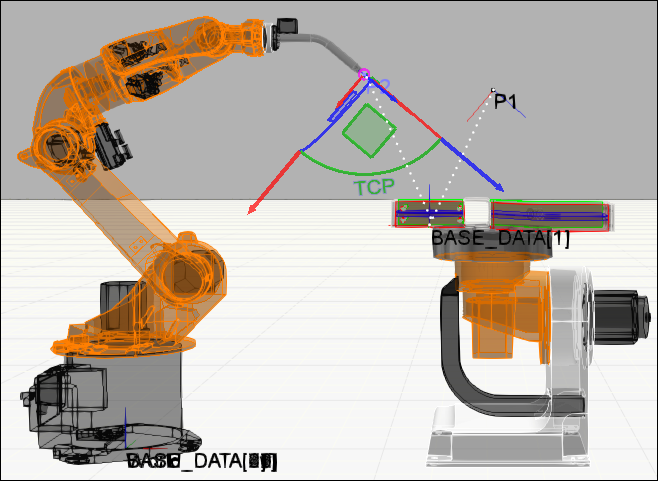
工具坐标框充当一个工具中心点(TCP)以及用于教授机器人定位。通常来说,工具坐标框位于机器人的法兰节点/安装板或者安装工具的中点和尖端。在大多数情况下,工具坐标框用作操作机的原点,而后,操作机可用于移动3D世界中的机器人和工具坐标框。操作机的大箭头会参照点动面板中的活跃坐标系,而小箭头则会参照工具坐标系。
教授位置的一种方式是参照一个基坐标系和计算至活跃工具框及其方向的距离。在这些情况下,操作机会移动机器人和活跃工具坐标框至这个位置。基坐标框是该位置的父系坐标系,因此,移动基坐标框会移动该位置及其它附加至它的位置。若您在3D世界或者点动地图面板中选择一个机器人位置,机器人会对齐至该位置。
小贴士 : 使用 锁定位置至世界 命令以使您在更改机器人的位置、基坐标框或者这些位置参照的任何其它物体时,机器人在3D世界中的位置不会移动。使用选择命令以选择一个机器人位置,并且不让其拥有的机器人对齐该位置。
在有些情况下,工具坐标框可附加至其它组件中的节点并用作外部TCP。例如,您可以附加一个工具坐标框至一个静止工具,由此,机器人可以围绕空间中的一个固定点为自己定向。在有些情况下,基坐标和工具坐标框的角色可以互换,从而将工具坐标框用作基坐标,而基坐标框则用作一个TCP。因此,机器人的位置将承继基坐标框的方向。
当对齐操作机时,机器人的接近轴属性将根据活跃工具坐标框的方向确定如何为机器人定向。例如,工具坐标框的一个常见方向是沿其正Z轴方向向下指。
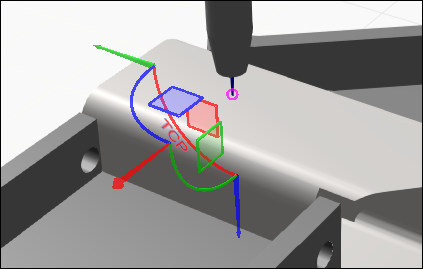
通常来说,您会更改机器人的接近轴以获得不同的结果。
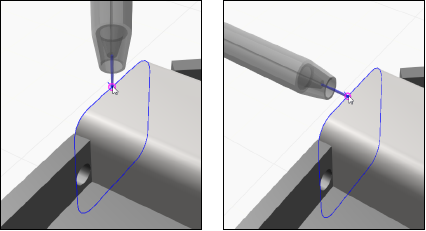
当您尝试移动操作机至一个机器人无法达到的点时,3D世界中会显示出错并指回操作机的原点。
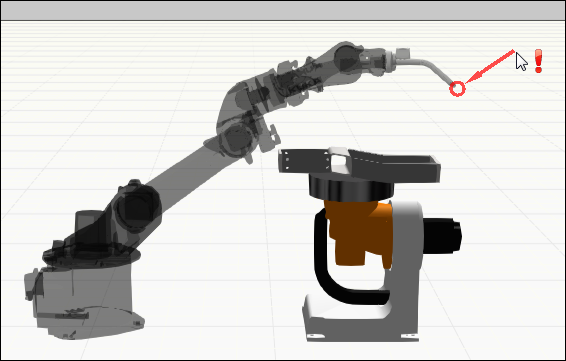
同样,3D世界中不可到达的机器人位置将以红色标出。