调整选项卡
注意: 本主题仅适用于以下 Robotics OLP 产品:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
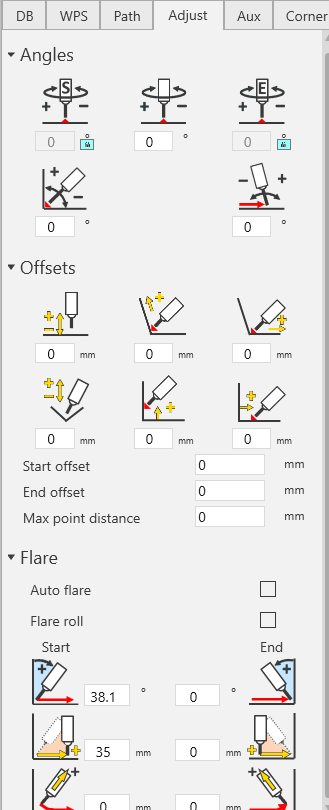
角度:工具角度
- 导线旋转:焊枪绕TCP的z轴进行旋转。可以同时调整路径上所有点的导线旋转角度,也可通过解锁起点和/或终点的导线旋转角度(点击“锁定”图标)分别调整起点和/或终点的导线旋转角度
- 导线角度:导线偏离定点的角度。
- 倾斜角度: 前倾/后倾角度。负值表示前倾角度,正值代表后倾角度。
偏移量:相对于原始位置的路径偏移量
- 导线偏移: 沿导线偏移
- 墙面切线偏移: 沿墙体切线偏移
- 基面切线偏移: 沿基面切线偏移
- 平分线偏移:沿角平分线偏移
- 基面法线偏移: 沿基面偏移
- 墙面法线偏移: 沿墙面偏移
- 起点偏移: 相对于原始起点的起始偏移
- 终点偏移: 相对于原始终点的终点偏移
- 最大点距离: 指定两个点之间的最大距离。允许在路径起点和终点之间创建更多的点。
扩张:当路径从内角开始或结束于内角时,会使用扩张角。
- 自动扩张:如果选中 “自动扩张”,则软件会尝试自动计算所需的角度,以避免在角的起点和终点发生碰撞。
- 扩张旋转:默认情况下,扩张旋转功能处于开启状态。在垂直路径等情况下,如果需要,可以关闭扩张旋转功能。
- 开始:
- 扩张角度:焊枪需偏离起点,这样它就不会与墙面(如果存在)发生碰撞。
- 扩张距离: 焊枪到达路径中使用的法线角度(倾角;前倾、后倾或倾角角度为 0)时,距离起点位置的距离。
- 起点处的导线偏移。
- 终点:
- 扩张角度:焊枪需偏离终点,这样它就不会与墙面(如果存在)碰撞。
- 扩张距离:焊枪开始转向扩张角时,距离终点位置的距离。
- 终点处的导线偏移。