辅助(辅助轴)选项卡
注意: 本主题仅适用于以下 Robotics OLP 产品:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
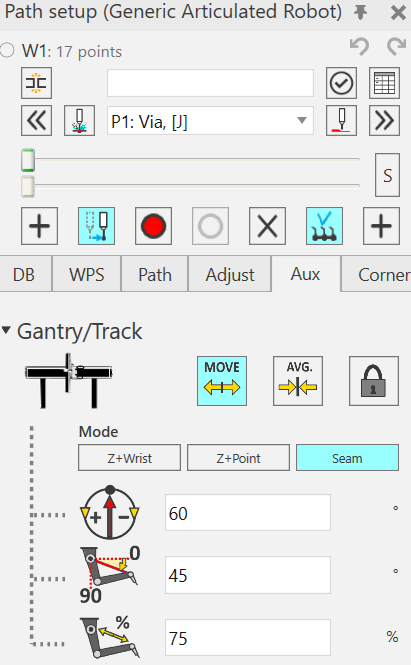
龙门架/轨道
用于控制机器人定位装置进行计算的参数
- 移动:允许机器人定位器在焊接期间移动
- 平均值:软件将计算机器人定位器的值,使其能够到达所有点,但在焊接过程中不移动。
- 锁定:将机器人定位器锁定到焊接路径上所有点的当前位置
- 模式: 计算下列参数(Z+ 手腕、Z+ 点、焊缝)的位置
- 方位角:机器人基坐标的位置
- 仰角:机器人第二个关节和第五个关节之间的角度(仅适用于龙门架)
- 拉伸:机器人第二个关节和第五个关节之间的距离(以百分比表示)(仅适用于龙门架)
提示:想要学会高效使用这些参数,请在模拟窗口中尝试使用这些参数并查看机器人的行为表现
链接限制
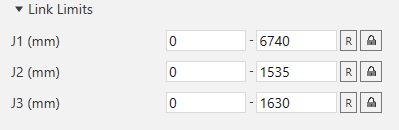
- 为所需轴设置龙门架限值。
- R = 重置定位器标称值
- 锁定所需的龙门轴
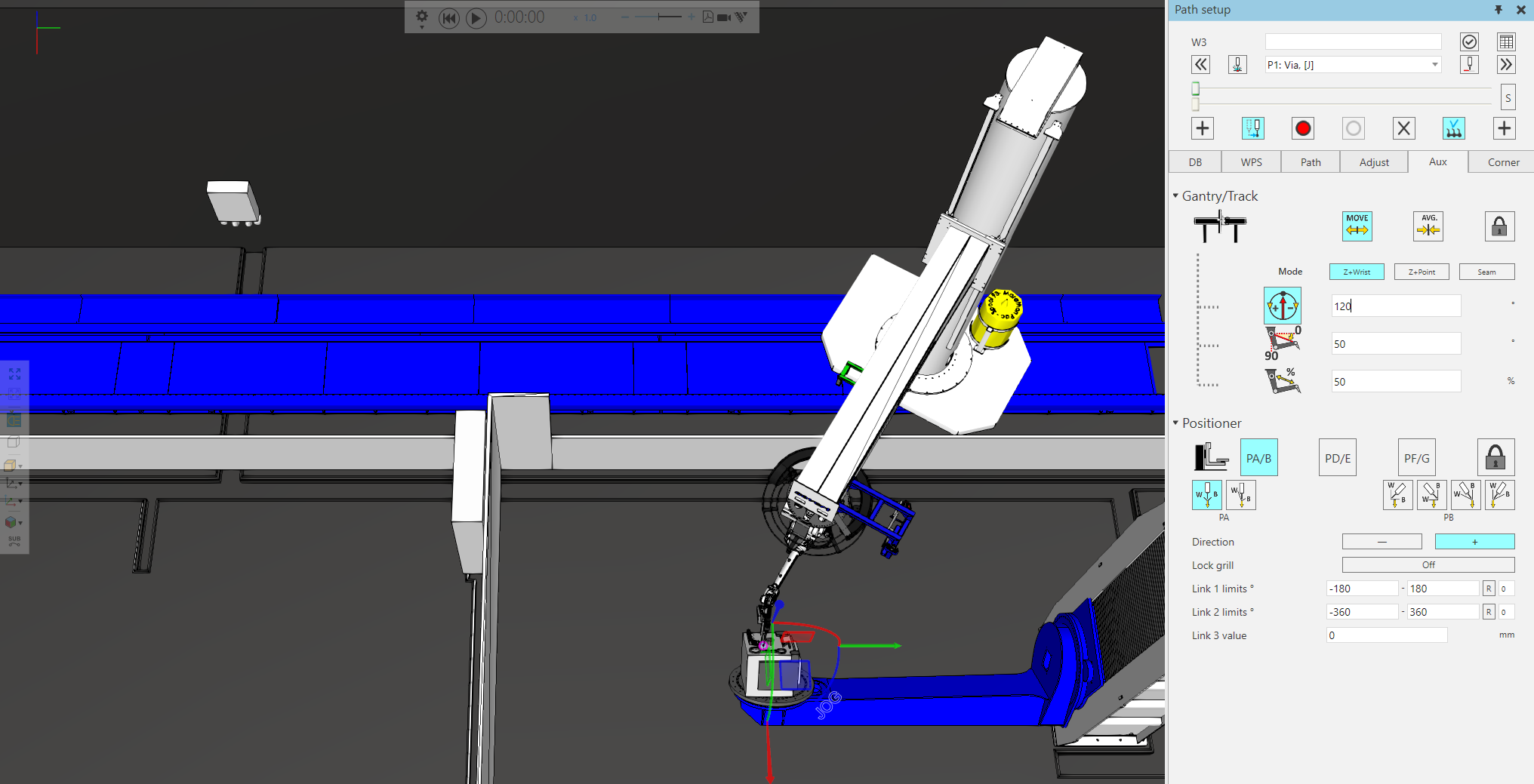
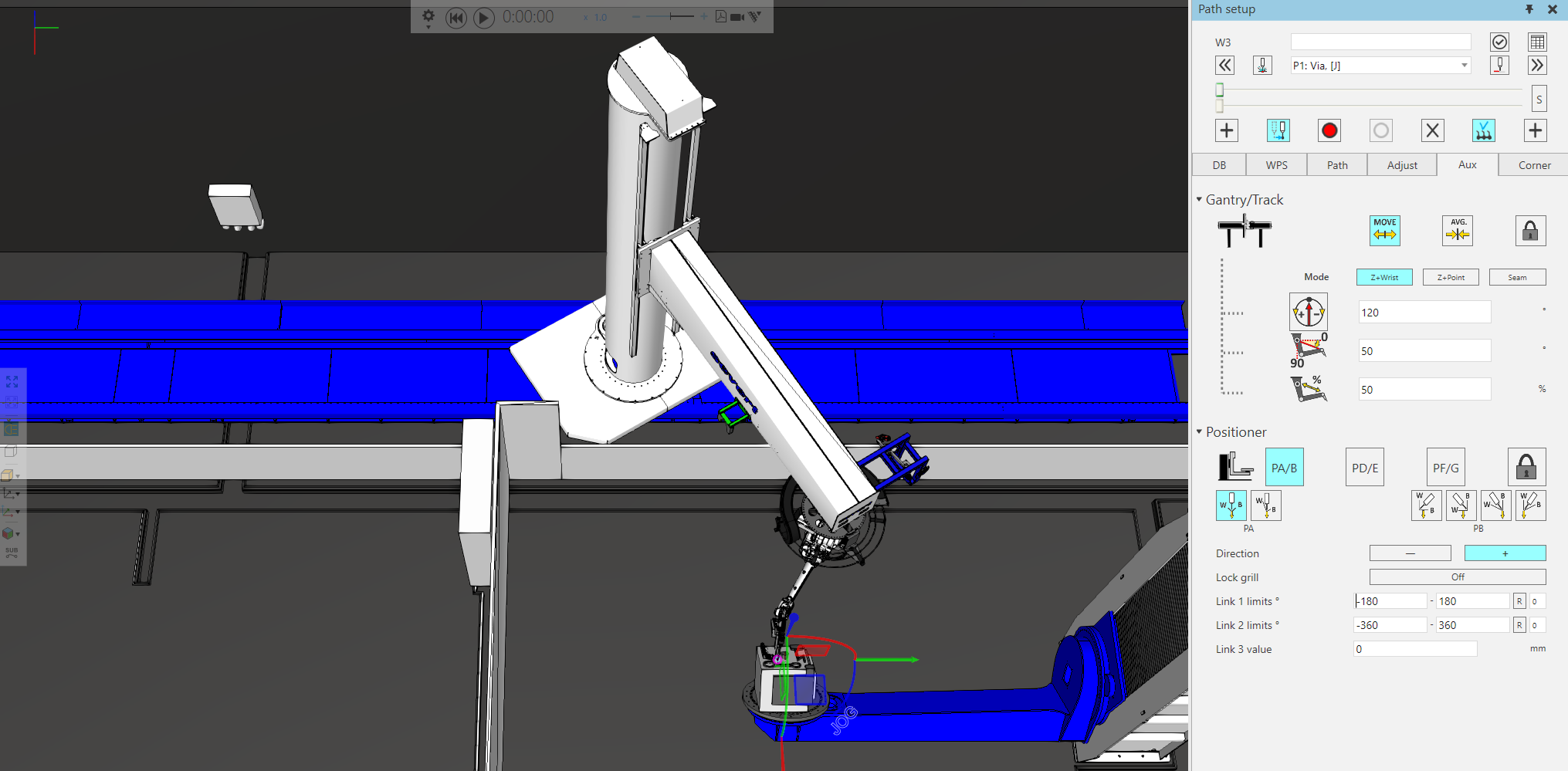
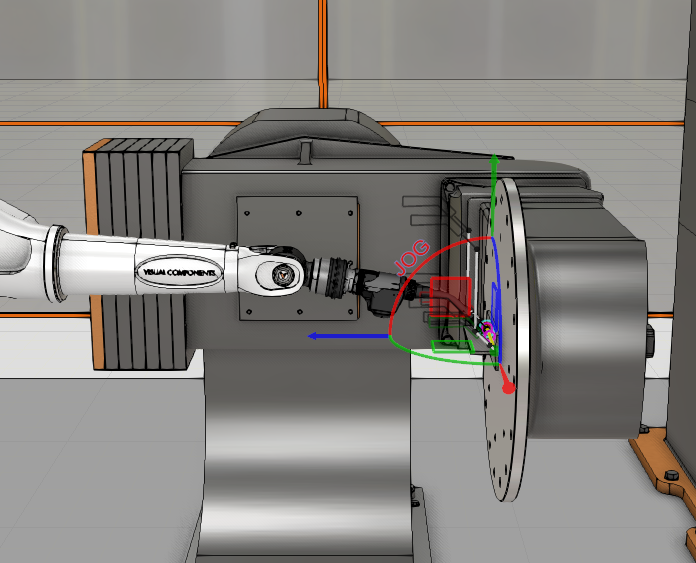
翻转龙门旋转轴
在TRT/TR龙门系统中,计算方位角时,龙门架可在移动机器人基坐标时实现两种可能的解决方案,具体如下图所示。
定位器
用户可以从此处提供的预定义焊接位置中进行选择,软件将自动设置工件定位器以实现所选位置。
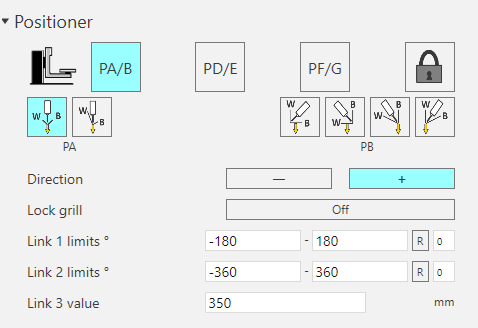
PA 位置 (1G/1F)
自动设置定位器以实现平焊位置。
有两个选项。选择第一个选项,焊缝则将一直处在向下位置。即使您在“调整”选项卡中更改导线角度,工件定位器仍将保持不变,机器人也将移动。
选择第二个选项,导线则将一直处于向下位置。因此,在“调整” 选项卡中对导线角度进行任何更改都会导致工件定位器移动,但机器人会静止不动以保持位置。
PB 位置 (2F)
自动设置定位器以实现横焊位置。
还可以设置焊缝哪一部分向上。
PD/PE 位置 (4F)

自动设置定位器设置以实现仰焊位置。
PF/PG 位置
自动设置定位器以实现立焊位置。
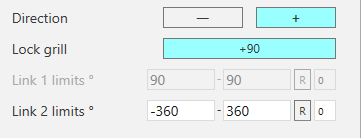
方向:更改定位器的 “配置”。
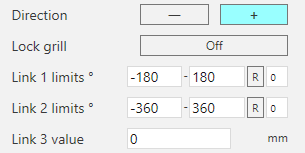
锁定格栅:将双轴定位器的第一轴锁定到90/-90度值,以将其作为单轴定位器使用
链接限制:
- 以度为单位设置活动焊接路径的定位器限值,
- R = 重置定位器标称值
- 设置定位器轴的转向值
例如,对于轴2(旋转板)值被限定在-720到720之间的定位器,可进行如下设置:
- turn =0 → 将轴值设置在 -180 到 180 之间
- turn =1 → 将轴值设置在 180 到 540 之间
- turn =-1 → 将轴值设置在 -540 到 -180 之间
- turn =2 → 将轴值设置在 540 到 720 之间
- turn =-2 → 将轴值设置在 -540 到 -720 之间
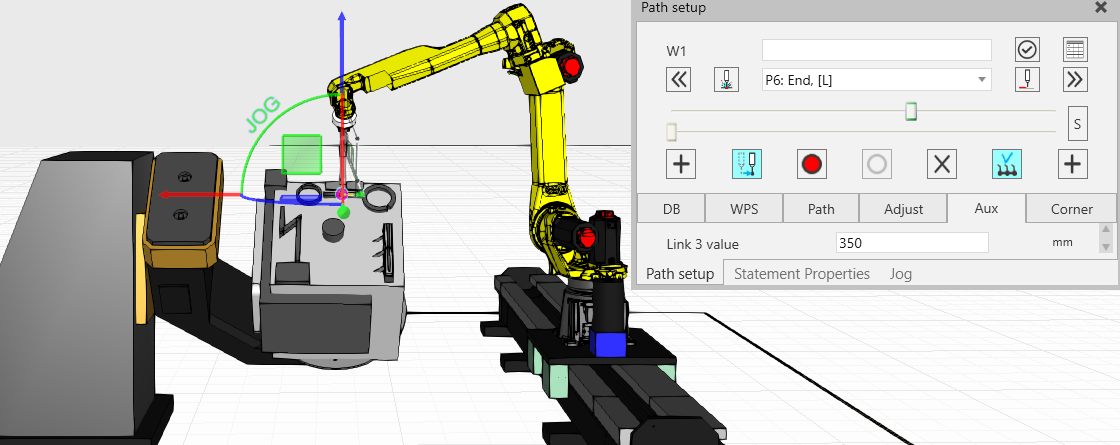
链接3值:对于3轴工件定位器,您可以在此字段中滚动鼠标滑轮来更改定位器链接3(仰角链接)的值,并在3D窗口中查看即时更新。
“辅助”选项卡上的机器人关节7延长器
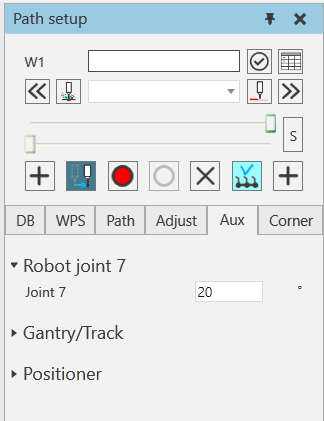
如果选择了7轴机械臂,则可以在“辅助”选项卡上找到 “机器人关节7”延长器。您可通过“关节7”的参数来修改完整路径的第7关节的值,也可以修改单个点的值。