环形搜索
注意: 本主题仅适用于以下 Robotics OLP 产品:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
环形搜索类型可用于检测和纠正环缝的偏差。
目前,OTC、ABB、Fanuc、Yaskawa 以及 Panasonic 机器人均支持此功能。
根据焊缝类型,可生成环内或环外搜索。
要创建环形搜索,请执行下列操作:
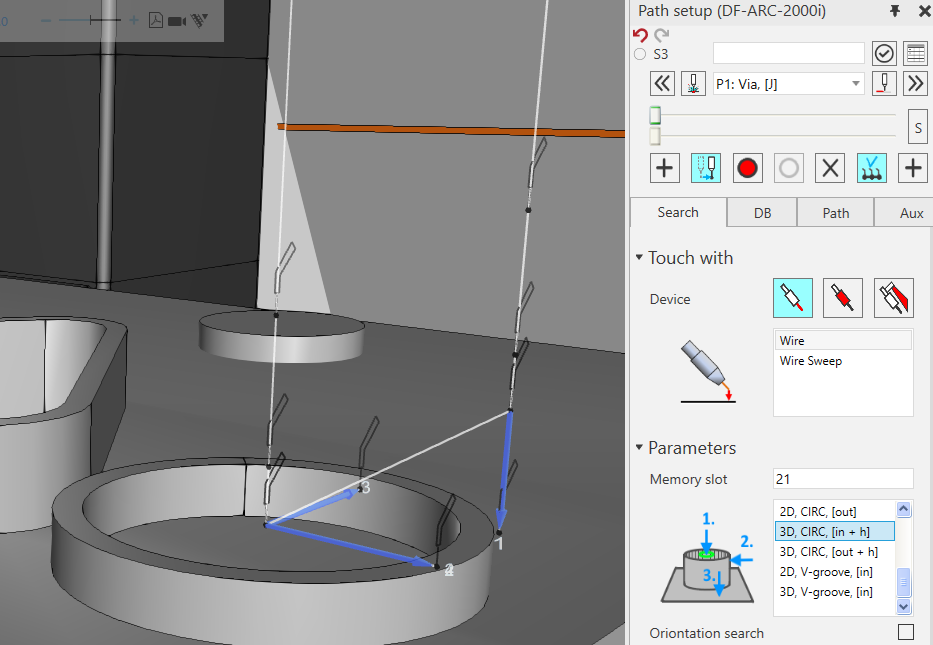
- 从“悬停 (Hovel)” 面板中选择“创建搜索路径”。
- 在“搜索路径设置”选项卡中,您可选择环形搜索的类型。可根据焊缝选择 2D.CIRC[IN]、2D.CIRC.[OUT]、3D.CIRC.[in+h] 或 3D.CIRC.[out+h] 。
- 选择搜索类型后,您可看到如何在 CAD 文件上拾取接触位置的预览。软件还将跳出信息,告诉您应该选择哪些表面。
- 完成上述步骤后,机器人的搜索运动路径将与途经点 (via point) 一起生成。
调整环形搜索参数
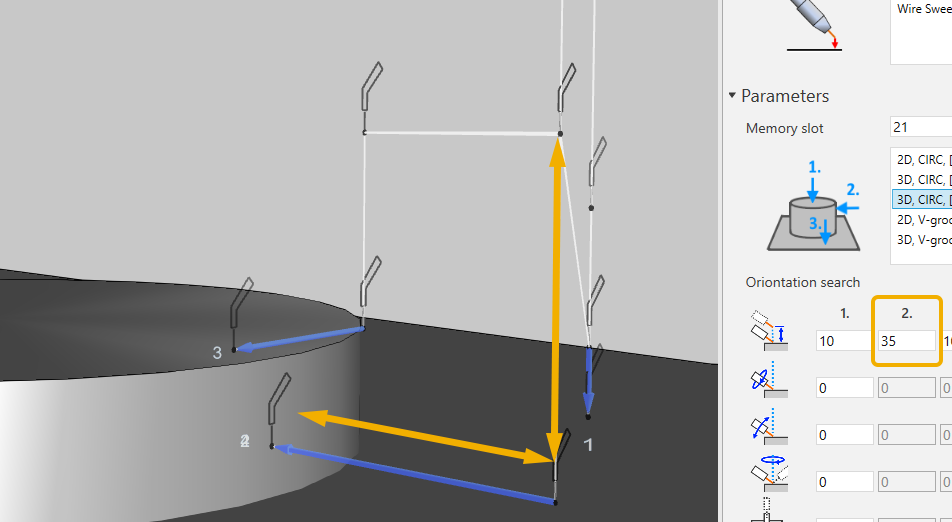
搜索行进距离
第 1 列值:沿焊缝向上/向下垂直移动接触点。
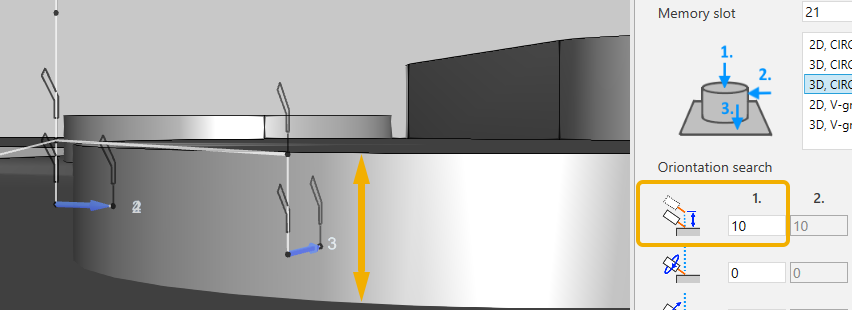
第 2 列值:对环内搜索没有影响。
对于环外搜索,需要设置开始搜索的位置,即距离接触位置多远处开始搜索。这有助于移动途经点,使焊枪从一个接触点移动到另一个接触点时不会发生碰撞。
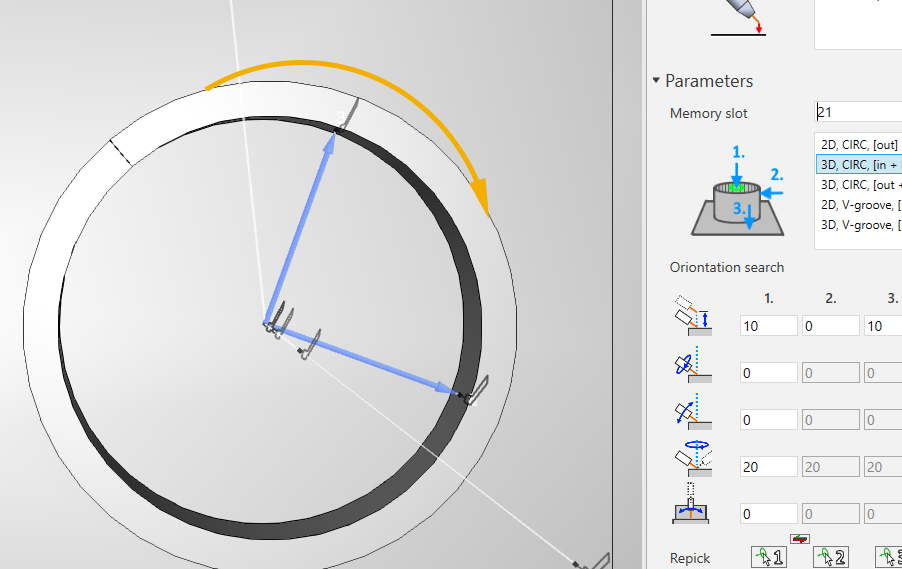
扭转角度
允许径向更改接触点的位置。
单独更改高度
要单独更改接触点的高度,请解锁第 3 列。调整第 3 列中的任何参数都会影响接触点的高度。
高级参数
创建环形搜索时,软件会自动创建两个高级参数:“HeightFirst” 和 “Variant”。您可从下拉菜单中选择所需的值。
可能的值有:
- HeightFirst:True/False(仅在 3D 环形搜索中)
- Variant:环内 1/ 2/3,环外 1/ 2
这些参数是机器人品牌特有的。推荐的参数值和其他品牌的特定参数信息:
- ABB:环内搜索 Variant 1(2/3 未测试)
- Fanuc:环内搜索 Variant 2 或 3,环外搜索 Variant 2
- OTC:环内搜索 Variant 2 或 3,环外搜索 Variant 2
- Panasonic:只有 2D 环形搜索。环内搜索 Variant 1,环外搜索 Variant 1或 2(对于 Panasonic 机器人,需要启用 SLS 搜索:机器人设置 | 路径 | 搜索:PanasonicSLS。至于其他高级参数,请向当地经销商询问详情)
- Yaskawa:环内搜索 Variant 2 或 3,环外搜索 Variant 2
注意:更改高级参数后,相关效果并不会自动显示在 3D 窗口中。要查看更改 "HeightFirst" 或 "Variant" 参数后的效果,您必须执行下列操作。
- 例如,将 Variant 更改为 3
- 接下来,您需要更改其他参数的值,然后改回原始值,例如您可以将焊丝的参数更改成某个值,然后再改回原始值。
- 只有如此操作后,您才可以看到软件又为搜索路径生成一个接触点位置。