多道焊
注意: 本主题仅适用于以下 Robotics OLP 产品:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
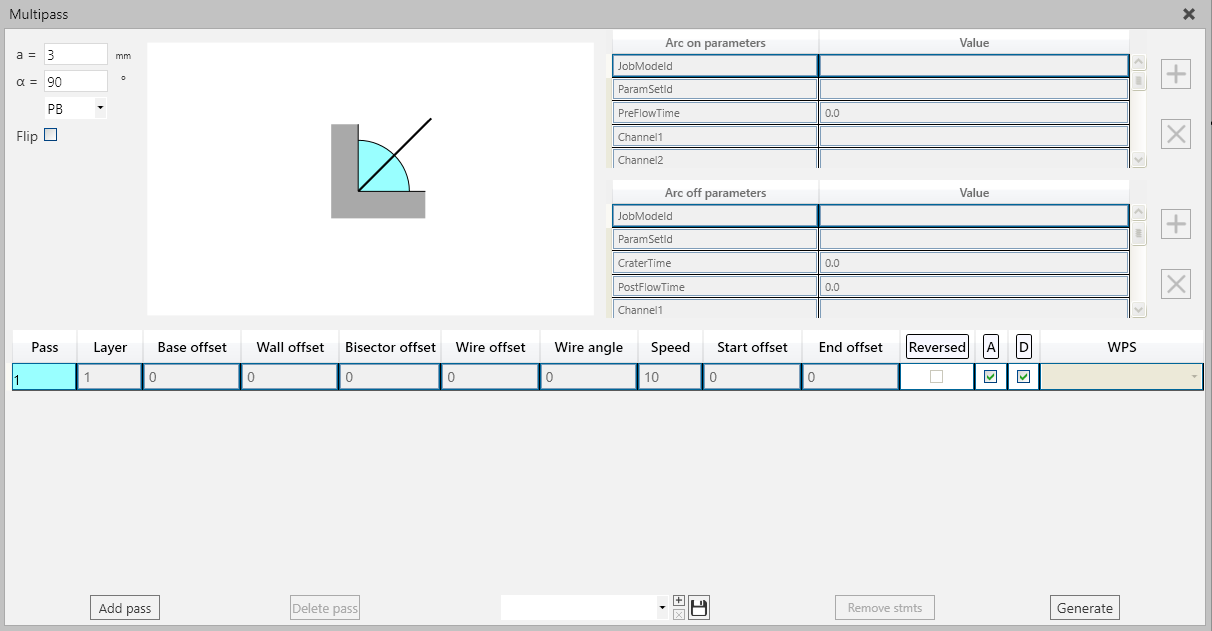
创建根焊道以作为正常焊接路径使用,或从“程序编辑器中”选择现有焊接语句作为根焊道。在语句工具栏中点击“多焊道 (Multipass)”,即可打开“多焊道”用户界面。

多焊道用户界面:
- 您可在左下角添加、删除焊道。
- 左上角
- a:用于模拟的值(焊喉厚度)
- α:焊缝底部和墙面之间的夹角角度
- 翻转:翻转夹角的方向
- 在多焊道表中,您可修改每条焊道的参数: 焊层、底部偏移、墙面偏移、等分线偏移、焊丝偏移、焊丝角度、速度、起点偏移、终点偏移、方向翻转和 WPS
- 点击“反向 (Reverse)”标签,则可以让焊枪每隔一条焊道,就进行反向移动。
- 在界面底部的中间区域,您可以保存多焊道模板。
- 单击“加号 (+)" 图标创建新模板,然后为该模板设置一个唯一的名称。
- 点击“叉号 (x)" 图标,则可删除未使用的模板。
- 如要修改模板,请点击“保存” 图标以保存所做的修改
- 点击“生成”可创建焊道
- 点击“删除语句 (Remove stmts)”,则可删除已创建的(用于焊道的)语句
- 注意:可在字段中使用运算符 “+”、“-”、“*” 和 “/” 以进行设置