快速机器人教学
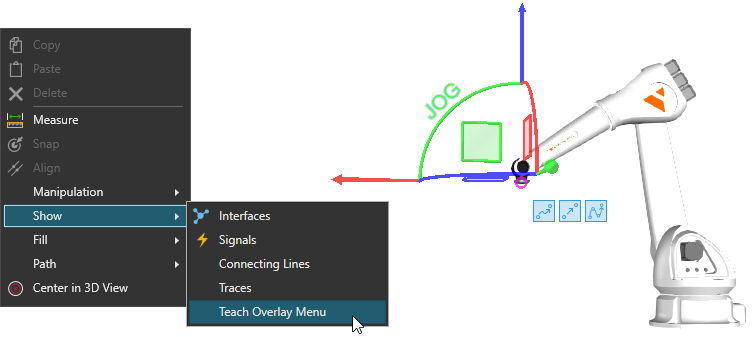
“快速机器人教学”可以让您使用“教学叠加”菜单中的动作,在机器人程序中创建语句。这样做的好处是机器人位置的快速教学,以及简化了在3D世界中对机器人编程的工作流程。
当使用“单轴”工具时,您拥有一组用于向活跃机器人添加语句的动作,例如线性和点对点运动。单击一个动作,向机器人的程序添加一条新语句。如果您单击同一动作,则先前添加的语句的值将用于创建新语句。如果您单击了不同的动作,该语句将使用其默认值。
您可以自定义“教学叠加”菜单中列出的动作。例如,您可以拥有一个用于添加自定义语句、子例程调用和其他命令的动作列表。要自定义显示的动作列表,请编辑Visual Components Premium 4.8的配置文件,或使用PythonAPI或.NET API。
示例。配置应用程序配置文件。
| <Site ItemId="VcTeachOverlayMenu"> <uxEntries> <UxItem ItemId="CloneTeachPtpMotionStatement"></UxItem> <UxItem ItemId="CloneTeachLinearMotionStatement"></UxItem> <UxItem ItemId="CloneTeachPathStatement"></UxItem> <UxItem ItemId="CreateHaltStatement"></UxItem> </uxEntries> </Site> |
示例。使用PythonAPI添加菜单项。
| from vcApplication import * cmd_name = 'RobotGrasp' title = 'myGraspAction' tooltip_name = 'Add Grasp routine' icon_name = 'rAddProgramStatement' def OnAppInitialized(): cmduri = getApplicationPath() + cmd_name + '.py' cmd = loadCommand(cmd_name, cmduri) addMenuItem('VcTeachOverlayMenu', title, 1, cmd_name, tooltip_name, icon_name) |