程序编辑器
程序编辑器面板可以让您查看和编辑机器人程序,预览动作,以及使用RSL语句为其它类别的组件编程。
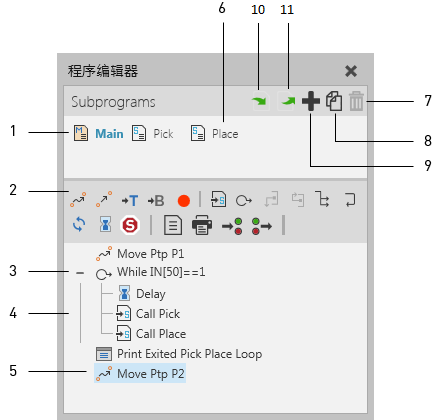
| 1. | 主程序 |
| 2. | 语句工具栏 |
| 3. | 条件语句 |
| 4. | 嵌套语句 |
| 5. | 运动类别语句 |
| 6. | 子程序 |
| 7. | 删除选中程序 |
| 8. | 复制选中程序 |
| 9. | 添加子程序 |
| 10. | 导入程序 |
| 11. | 导出程序 |
语句工具栏
语句工具栏会显示用于添加RSL语句至3D世界中选中机器人的程序的命令。
| 姓名 | 描述 |
| 中断 | 结束循环的执行。 |
| 调用顺序 | 在程序中执行一个特定的子程序。 |
| 评论 | 在程序中留下评论。 |
| 继续 | 设置循环为从下个迭代继续。 |
| 定义基坐标 | 设置机器人中基坐标框的属性。 |
| 定义工具 | 设置机器人中工具框坐标的属性。 |
| 延时 | 延迟程序的执行。 |
| 停止 | 停止程序的执行。 |
| If | 定义“if-then-else”条件,从而在条件为“Ture”时执行一组语句,条件为“False”时执行另一组语句。 |
| 关节运动 | 插入关节值执行至一个位置点对点运动。 |
| 线性运动 | 根据当前配置执行至一个位置的线性运动。 |
| 打印 | 在输出面板中发送要打印的反馈。 |
| 程序同步 | 使用一个匹配的同步消息将程序执行与其它可编程组件同步。 |
| 返回 | 结束程序的执行。 |
| 设置二进制输出 | 设置连接至机器人输出或者表示机器人动作的数字信号值。 |
| 修整 | 为选中的机器人位置更改运动语句的属性。 |
| 等待二进制输入 | 等待连接至机器人输出的信号达到某个特定值。 |
| While | 定义循环执行一组语句的条件。 |
程序
机器人的程序是它的工作,与机器人一同保存在布局中。若需要重新排列程序中的语句,请将语句拖放至另一个语句之前或者之后。您输入语句的位置以一条线表示,这条线也会指明您插入语句的等级。
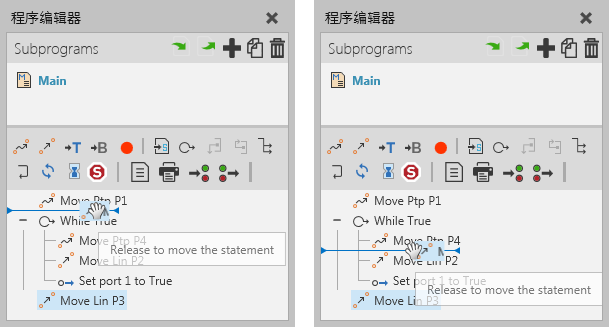
在运行一个模拟时,当前在机器人程序中正在执行的语句由程序编辑器面板右侧的箭头表示。
