Kinematik
Eine Verhaltensweise vom Typ Kinematik wird verwendet, um die Vorwärts- und oder Rückwärtskinematik einer Komponente und ihrer Knotenstruktur, z. B. Roboter, zu definieren.
Typen
| Name | Beschreibung |
| Knickarm-Kinematik | Definiert die Kinematik von Gelenkarmrobotern, beispielsweise Sechsachs-Robotern. |
| Kartesische Kinematik | Definiert die Kinematik von linearen Robotern, beispielsweise Dreiachs-Robotern, mit zusätzlicher Unterstützung von Dreiachs-Handgelenkbewegungen |
| Delta-Kinematik | Definiert die Kinematik von Delta-Robotern. |
| Parallelogramm-Kinematik | Definiert die Kinematik von Parallelogramm-Robotern. |
| Python-Kinematik | Definiert die benutzerdefinierte Kinematik von Komponenten, die Skripte verwenden. |
| SCARA-Kinematik | Definiert die Kinematik von SCARA-Robotern. |
Zuweisung
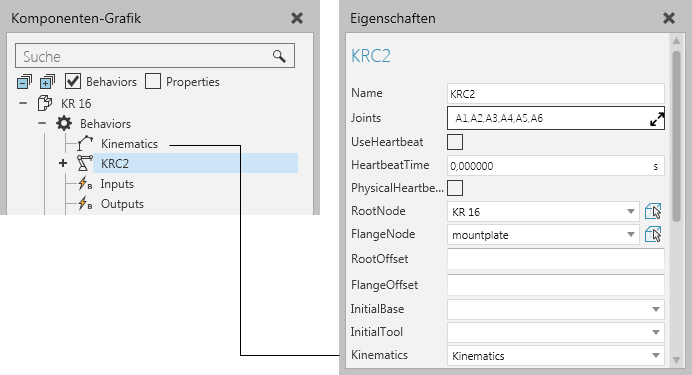
In allen Fällen müssen Kinematik-Verhaltensweisen einer Robotersteuerungsverhaltensweise zugewiesen werden, damit sie für die Lösung kinematischer Gleichungen verwendet werden können.
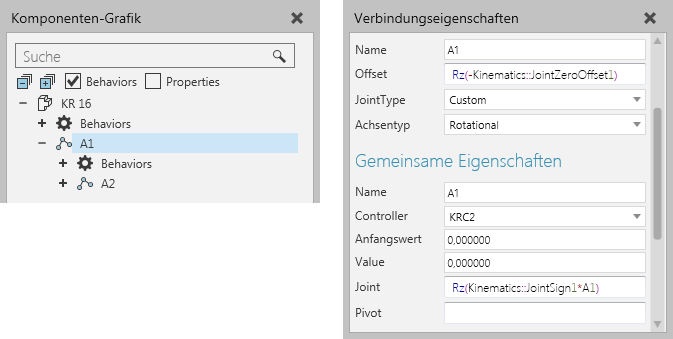
Trotz des Einsatzes von Kinematik-Verhaltensweisen müssen die Gelenke einer Komponente korrekt definiert werden.