Kawasaki-Roboter-Controller
Über das Plugin
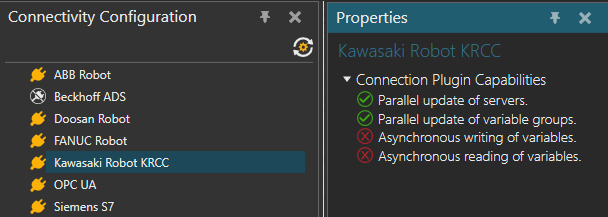
Der Anschluss unterstützt eine direkte Verbindung zu einem Kawasaki-Roboter-Cntroller. Dazu gehören sowohl ein physischer als auch ein virtueller Controller.
Terminologie
- KRCC — Kawasaki Robot Control-Klassenbibliothek (Kawasaki Robot Control Class Library).
- IO — Eingabe/Ausgabe (Input/Output).
Anforderungen
Die Verbindung erfordert Visual Components Premium 4.9.
Einrichtung
Hinweis: Zusätzlich zu den folgenden Einrichtungsinformationen finden Sie in der Videolektion (auf Englisch) auf der Visual Components Academy.
Der Anschluss unterstützt die folgenden Aktionen:
- Verbindung zu einem oder mehreren Kawasaki-Robotern gleichzeitig.
- Gemeinsame Werte lesen
- Lesen von Ein- und Ausgaben.
- Ausgaben schreiben.
In Bezug auf die Technologie wird die KRCC-Bibliothek von Kawasaki für die Kommunikation verwendet.
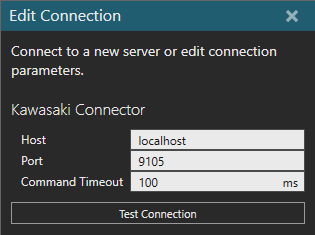
Verbindung zum Roboter herstellen
Wenn Sie eine Verbindung zu einem Roboter herstellen, verwenden Sie die richtige IP-Adresse und Portnummer. Standardmäßig verwendet das KRCC für jede Verbindung die Ports 9105, 9205, 9305 usw., aber überprüfen Sie die richtige Portnummer, die Sie verwenden müssen, wenn Sie eine Verbindung zu einem echten Roboter herstellen.
Mapping von Variablen
Die Ordner Movement und IO für jeden verbundenen Roboter enthalten die Variablen für gemeinsame Werte und IO. Die verfügbare I/O basiert auf dem angeschlossenen Roboter. Die IO-Bereiche entsprechen der Kawasaki-Spezifikation, zum Beispiel 1-32 für Ausgaben und 1001-1032 für Eingaben.

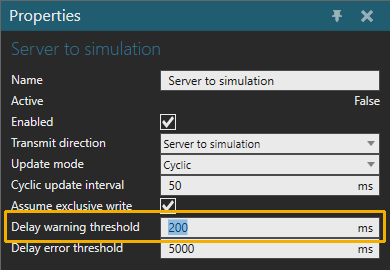
Empfehlungen
Bei einem virtuellen Controller wurde beobachtet, dass die Aktualisierungsrate für die Kommunikation im Durchschnitt 50 ms überschreiten kann, insbesondere wenn der Roboter inaktiv ist. Um Warnmeldungen und die Protokollierung dieses Verhaltens zu vermeiden, sollten Sie erwägen, in der Variablengruppe einen höheren Verzögerungswarnschwelle zu verwenden.
Nachbearbeitung des Roboterprogramms
Postprozessor
Wenn Sie Roboterprogramme von Ihrem Visual Components-Modell auf den nativen Controller übersetzen müssen, können Sie den Postprozessor verwenden.
Hinweis: Der Postprozessor ist in den folgenden Produkten verfügbar:
- Visual Components Premium
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
Weitere Informationen zur Nachbearbeitung mit einem Visual Components OLP-Produkt finden Sie unter Roboterprogramm übersetzen.
Um das Roboterprogramm für die echte Robotersteuerung zu übersetzen:
- Klicken Sie auf den Roboter (oder ein anderes Gerät), dessen Programm Sie übersetzen möchten.
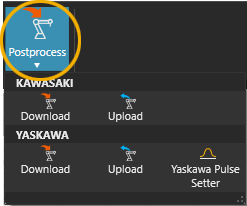
- Klicken Sie auf Nachbearbeiten in PROGRAMM Werkzeuge der Multifunktionsleiste.
- Klicken Sie auf Herunterladen unter dem richtigen Markennamen des Roboters.
- Wählen Sie den Ordner, in dem Sie die Programmdatei speichern möchten und geben einen Namen für die Datei ein.
-
Klicken Sie auf Speichern
Die Datei kann an die Robotersteuerung übertragen werden
Hinweis: Führen Sie bei echten Robotern nur die Roboterprogramme aus, die anhand von kalibrierten Modellen übersetzt wurden. Andernfalls kann es bei der Ausführung des Programms zu unvorhersehbaren Kollisionen und Fehlern kommen.
Weitere Informationen finden Sie in den markenspezifischen Handbüchern für Visual Components Robotics OLP-Roboter im Visual Components OLP Extranet.