Benutzerschnittstelle
Stäubli Zellenkonfiguration
Das Stäubli Zellenkonfigurations-Panel ist das Hauptpanel des Stäubli Add-Ons.
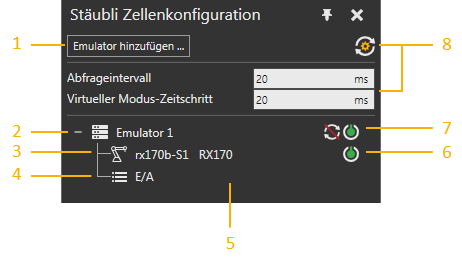
| 1. | Emulator hinzufügen |
| 2. | Emulator-Verbindung |
| 3. | Roboter-Zuordnungen |
| 4. | E/A-Zuordnungen |
| 5. | Zellenkonfigurations-Baum |
| 6. | Roboter-Zuordnungen ein-/ausschalten |
| 7. | Simulationsmodus und Emulator verbinden/trennen |
| 8. | Synchronisations-Zeit-Einstellungen |
Emulator hinzufügen
Der Emulator hinzufügen Knopf zeigt die Emulator-Ziel-Bearbeitung Taskleiste an, die es Ihnen erlaubt, eine neue Emulator-Verbindung zum Zellenkonfigurations-Baum zu testen und hinzuzufügen.
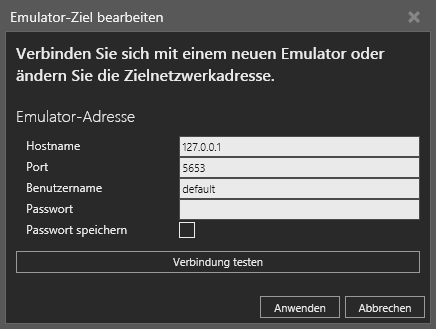
Hinweis: Sie können keine neue Konfiguration hinzufügen, falls Hostname/-adresse und Portnummer einer vorhandenen Emulator-Verbindung entsprechen.
Synchronisations-Zeit-Einstellungen
Der Synchronisations-Zeit-Einstellungen Knopf zeigt eine Liste globaler Einstellungen aller verbundener Emulatoren an. Sie steuern, wie gleichmäßig Roboterbewegungen erfasst und gesteuert werden können, und zwar sowohl im Simulator als auch im VAL 3 Roboterprogramm, das auf einem verbundenen Emulator läuft. Dies umfasst ebenfalls die Frequenz der Änderungen der E/A-Werte.
Ein Standardvorgabewert von 20 ms wird für die Zeitschritt-Einstellung von Abrufintervall und Virtuell Modus verwendet. Diese Einstellungen werden nicht mit dem Layout, sondern mit Ihren Anwendungsbenutzer-Einstellungen gespeichert.
Zellenkonfigurations-Baum
Der Zellenkonfigurations-Baum zeigt Emulator-Verbindungen und Roboter- und E/A-Zuordnungen an.
Niveau 1 - Emulator-Verbindungen
Eine Emulator-Verbindung wird stets durch einen eindeutigen Namen, zusammen mit seinem Simulationsmodus und einem Steuerknopf des Zustandes der Emulator-Verbindung angezeigt. Wenn der Simulationsmodus nicht Leerlauf ist und die Simulation zurückgesetzt wird, können Sie einen Emulator anschließen/ entfernen, um die Synchronisation ein-/auszuschalten , ohne den Simulationsmodus ändern zu müssen.
Mit einem Rechtsklick auf eine Emulator-Verbindung erhalten Sie die folgenden Optionen.
| Bezeichnung | Beschreibung |
| Ziel ändern | Öffnet die Emulator-Ziel bearbeiten Taskleiste, die Ihnen erlaubt, die Netzwerkadresse des Emulators zu bearbeiten. |
| Verbinden | Verbindet das Stäubli Add-On mit dem Emulator. |
| E/A-Zuordnungen bearbeiten | Öffnet den E/A-Zuordnungs-Editor und erlaubt es Ihnen, die Simulationsvariablen dem physischen E/A der Steuerung zuzuordnen. |
| Trennen | Trennt das Stäubli Add-On vom Emulator. |
| Entfernen | Löscht den Emulator vom Stäubli Add-On. |
| E/A-Zuordnungen anzeigen | Zeigt das Stäubli Steuer-E/A-Zuordnungen Panel. |
Niveau 2 - Roboter-Zuordnungen
Ein verbundener Emulator ist mit wenigstens einem Roboter assoziiert, der in der Stäubli-Steuerung konfiguriert ist, die mit einem Roboter in der 3D-Welt verbunden oder ihm zugeordnet ist. Eine Roboter-Zuordnung gibt den Namen des Roboter in der Stäubli Steuerung und den Namen seines in der 3D-Welt zugeordneten Roboters an, gefolgt von einem Knopf, der den Status der Verbindung zwischen den Robotern steuert.
Mit einem Rechtsklick auf eine Roboter-Zuordnung erhalten Sie die folgenden Optionen.
| Bezeichnung | Beschreibung |
| Verbundenen Roboter ändern | Öffnet die Verbundenen Roboter ändern Taskleiste, die Ihnen die Zuweisung eines Robers in der Stäubli-Steuerung an einen Roboter in der 3D-Welt erlaubt. |
| Nachbearbeitungs-Programm | Öffnet die Erstellen der VAL 3 Anwendung Taskleiste, die Ihnen die Erstellung einer VAL 3 Anwendung erlaubt. |
Niveau 3 - Eingaben und Ausgaben
Ein verbundener Emulator hat seinen eigenen Satz an Ein- und Ausgängen, die E/A-Zuordnungen für Simulationsvariablen und dem physischen E/A der Stäubli-Steuerung sind.
Per Rechtsklick auf die E/A Zuweisung erhalten Sie die folgenden Optionen.
| Bezeichnung | Beschreibung |
| E/A Einstellungen bearbeiten | Öffnet den E/A-Zuordnungs-Editor und erlaubt es Ihnen, die Simulationsvariablen dem physischen E/A der Steuerung zuzuordnen. |
| E/A-Zuordnungen anzeigen | Zeigt das Stäubli Steuer-E/A-Zuordnungen Panel. |
Eigenschaften
Das Eigenschaften-Panel erlaubt es Ihnen, die Eigenschaften ausgewählter Objekte im Stäubli Zellenkonfigurations-Panel anzusehen und zu bearbeiten.
Emulator-Verbindung
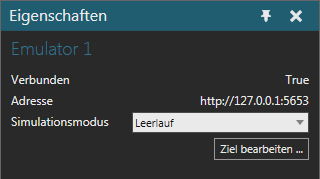
| Bezeichnung | Beschreibung |
| Verbunden | Zeigt den Zustand der Verbindung an. |
| Adresse | Zeigt die Netzwerkadresse des Emulators an. |
| Simulationsmodus | Legt den Interaktions-Modus zwischen dem Stäubli Add-On und
der verbundenen Steuerung während der Simulation fest.
Leerlauf Virtuell Abruf Jogging Tipp: Im Jogging-Modus können Sie einen Roboter laufen lassen, ohne eine Simulation laufen lassen zu müssen. Denken Sie daran, die Stromversorgung des Roboterarms in der Stäubli-Steuerung abzuschalten, bevor Sie den Jogging-Modus aktivieren. |
| Ziele bearbeiten | Öffnet die Emulator-Ziel bearbeiten Taskleiste, die Ihnen erlaubt, die Netzwerkadresse des Emulators zu bearbeiten. |
Roboter-Zuordnung
Falls der Roboter in der Stäubli-Steuerung keinem Roboter in der 3D-Welt zugeordnet ist, wird ein Simulations-Roboter zuordnen Knopf im Eigenschaften-Panel angezeigt. Dieser Knopf öffnet die Verbundenen Roboter ändern Taskleiste, mit der Sie einen Roboter in der Stäubli-Steuerung einem Roboter in der 3D-Welt zuordnen können.
E/A-Zuordnung
Das Erscheinungsbild ist dasselbe wie das Stäubli-Steuerung E/A-Zuordnung Panel.
Verbundenen Roboter ändern
Die Verbundenen Roboter ändern Taskleiste erlaubt es Ihnen, einen Roboter in der Stäubli Steuerung einem Roboter in der 3D-Welt zuzuordnen. Diese Aktion umfasst die Wahl einen Roboters in der 3D-Welt und die Betätigung des Anwenden oder Abbrechen-Knopfes, um die Änderung entweder zu bestätigen oder abzubrechen.
Bitte beachten Sie die folgenden Richtlinien:
- Sie können keine Roboter mit unterschiedlichen Achszahlen zuordnen.
- Bei Wahl eines Roboters in der 3D-Welt:
- Der derzeit zugeordnete Roboter wird normal angezeigt und wird nicht hervorgehoben.
- Kompatible Roboter werden gelb hervorgehoben.
- Inkompatible Roboter werden grau hervorgehoben.
- Neu gewählte Roboter werden grün hervorgehoben.
- Das Klicken auf eine leere Stelle in der 3D-Welt löscht die Wahl und erlaubt anschließend, die Zuordnung der beiden Roboter zu löschen.
- Falls E/A-Zuordnungen existieren, werden sie auf den neuen Roboter kopiert und vom alten Roboter gelöscht.
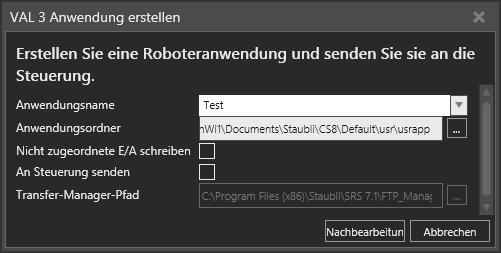
VAL 3 Anwendung erstellen
Die VAL 3 Anwendung erstellen Taskleiste erlaubt es Ihnen, das Roboterprogramm eines der VAL 3 Anwendung zugeordneten Roboters in der 3D-Welt nachzubearbeiten.
| Bezeichnung | Beschreibung |
| Anwendungsbezeichnung | Legt die Bezeichnung der VAL 3 Anwendung und des Ordners fest,
die zur Speicherung seiner Dateien verwendet wird.
Sie müssen einen gültigen Windows-Ordner und Dateinamen verwenden und die Namens-Einschränkungen für VAL 3 Anwendungen berücksichtigen. Bezeichnungen von nachbearbeiteten VAL 3 Anwendungen werden als verfügbare Optionen angezeigt, z.B wenn Sie Ihr Projekt überschreiben oder aktualisieren müssen. |
| Anwendungsordner | Legt ein Verzeichnis fest, das die VAL 3 Anwendung und ihren Ordner enthält. |
| Unzugeordnete E/A schreiben | Bestimmt, ob unzugeordnete Ports, die im Roboterprogramm verwendet
werden, in die VAL 3 Anwendung geschrieben werden.
Wichtig: Ohne Zuordnung zu einer gültigen steuerungsseitigen Variable wird der Post-Prozessor fehlschlagen, einen gültigen VAL 3 Befehl zu schreiben, und die generierte VAL 3 Anwendung wird Syntaxfehler enthalten. |
| An Steuerung schicken | Aktiviert/sperrt die Verwendung des SRS Transfer Managers nach
beendeter Nachbearbeitung.
Der Transfer Manager verwendet Zeilenbefehlsparameter, die ihm sagen, womit er sich verbinden soll sowie den Pfad des Anwendungsordners. Im Allgemeinen wird dies für den Transfer einer VAL 3 Anwendung auf eine echte nicht-simulierte Stäubli-Steuerung mit einem FTP Server verwendet. |
| Transfer-Manager-Pfad | Legt den Pfad zur ausführbaren Datei des SRS Transfer-Manager fest. |
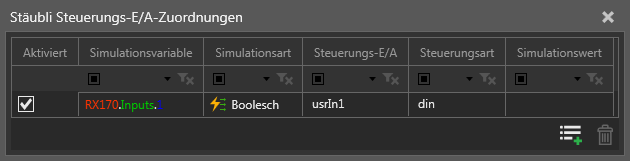
Stäubli-Steuerung E/A-Zuordnung
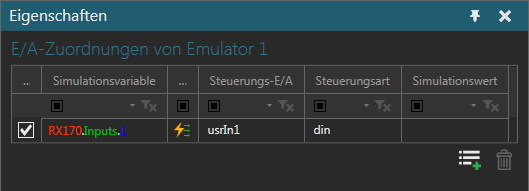
Das Panel Stäubli-Steuerung E/A-Zuordnung zeigt alle E/A-Zuordnungen zwischen Simulations- und Steuerungsvariablen eines in dem Stäubli-Zellkonfigurations-Panel gewählten Emulators an.
Hinweis: Sie haben per Rechtsklick auf die E/A Zuordnungen Zugang auf die Abkürzungen, um die ausgewählte Reihe zu löschen oder die Breite der Spalte zurücksetzen.
| Bezeichnung | Beschreibung |
| Eingeschaltet | Schaltet die E/A-Zuordnung ein/aus.
Sie können eine E/A-Zuordnung ein-/ausschalten, wenn eine Simulation pausiert oder zurückgesetzt wird. |
| Simulationsvariable | Variablenname in der Komponente, z.B. das Signal eines Förderers oder des E/A-Ports eines Roboters. |
| Simulationsart | Datentyp der Simulationsvariable.
Für mehr Informationen unter Unterstützte Variablen nachsehen. |
| Steuerungs-E/A | Name des physischen E/A in der Stäubli-Steuerung |
| Steuerungsart | Datentyp des physischen E/A in der Steuerung.
Für mehr Informationen unter Unterstützte Variablen nachsehen. |
| Simulationswert | Gibt den aktuellen Wert der Simulationsvariable an.
Der Wert wird durch Abruf mit einer bestimmten aber fehlerhaften Frequenz aktualisiert. Die nominale Aktualisierungsrate beträgt 5 Hz, sodass schnelle Änderungen möglicherweise nicht angezeigt werden. Hinweis: Der Wert eines E/A Ports kann nicht angezeigt werden, wenn er nicht mit Signal assoziiert wurde, denn die Signalzuordnung enthält keinen Wert. |
| E/A-Zuordnungen bearbeiten | Öffnet den E/A-Zuordnungs-Editor
und erlaubt es Ihnen, die Simulationsvariablen den physischen
E/A der Steuerung zuzuordnen, die spezifisch für die Emulatorverbindung
sind.
Sie können erneut eine E/A-Zuordnung hinzufügen, wenn die Simulation zurückgesetzt wird. |
| Zuordnung löschen | Löscht die gewählte E/A-Zuordnung
Sie können eine E/A-Zuordnung löschen, wenn die Simulation zurückgesetzt wird. |
E/A-Zuordungs-Editor
Der E/A-Zuordnungs-Editor erlaubt es Ihnen, Simulationsvariablen mit dem physischen E/A der Steuerung mit einem ausgewählten Emulator im Stäubli Zellenkonfigurations-Panel zu paaren/ihm zuzuordnen.
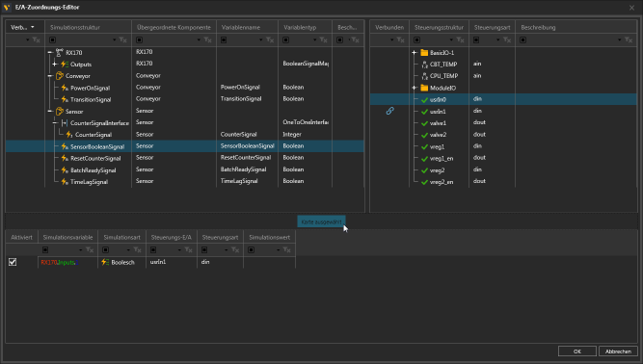
Simulationsvariablen
Die linke Leiste zeigt Daten der Simulationsvariablen an.
Hinweis: Per Rechtsklick auf Simulationsvariablen haben Sie Zugang auf eine Abkürzung, um alle Elemente oder einen ausgewählten Baum auszuklappen, einen ausgewählten Baum zusammenzuklappen oder die Breite der Spalten zurückzusetzen.
| Bezeichnung | Beschreibung |
| Verbunden | Gibt an, ob Variable zur Steuerungs-Variable |
| Simulations-Struktur | Baum aller verfügbaren Variablen der Komponenten und der Roboter
in der 3D-Welt.
Für mehr Informationen unter Unterstützte Variablen nachsehen. |
| Eltern-Komponente | Gibt die Komponente einer Variable an. |
| Variablenname | Gibt den Namen einer Variable an. |
| Variablentyp | Gibt den Datentyp einer Variable an. |
| Beschreibung | Liefert eine Kurzbeschreibung der Variable
Im Allgemeinen haben die E/A Ports eines Roboters eine Beschreibung, wenn sie ein Signal für Aktionen wie z.B. Ergreifen und Loslassen verwenden. |
Steuerungs-E/A
Die rechte Leiste zeigt Daten der physischen E/A-Steuerung an.
Hinweis: Per Rechtsklick auf die Liste der physischen E/A haben Sie Zugang auf eine Abkürzung, um alle Elemente oder einen ausgewählten Baum auszuklappen, einen ausgewählten Baum zusammenzuklappen, die Breite der Spalten zurückzusetzen oder die Liste neu zu laden.
| Bezeichnung | Beschreibung |
| Verbunden | Gibt an, ob der E/A einer Simulationsvariable zugeordnet ist. |
| Steuerungs-Struktur | Baum, der die verfügbaren E/A in der Stäubli-Steuerung enthält.
Für mehr Informationen unter Unterstützte Variablen nachsehen. |
| Steuerungsart | Gibt den Datentyp des E/A an. |
| Beschreibung | Liefert eine Kurzbeschreibung des E/A. |
Zugeordnete Variablen
Die untere Leiste zeigt Daten über zugeordnete Variablen an und hat das gleiche Erscheinungsbild wie das Stäubli-Steuerungs-E/A-Zuordnung Panel.
Zum Zuordnen der Variablen:
- Wählen Sie die Simulationsvariablen und die physischen E/A der Steuerung, die sie miteinander paaren wollen.
- Klicken Sie auf den Zuordnung gewählt Knopf. Die ausgewählten Variablen müssen miteinander kompatibel sein, sonst wird der Zuordnung gewählt Knopf ausgeschaltet.
- Führen Sie einen der folgenden Schritte aus:
- Um mehr E/A-Zuordnungen hinzuzufügen, wiederholen Sie Schritt 1.
- Um eine E/A-Zuordnung zu löschen, wählen Sie die Reihen der zu löschenden E/A-Zuordnungen, klicken Sie die rechte Maustaste und klicken Sie auf Auswahl löschen.
- Um alle Änderungen zu speichern, klicken Sie auf OK.
- Um keinerlei Änderungen zu speichern, klicken Sie auf Abbrechen oder Verlassen.
Hinweis: Wenn Sie mehrere Simulationsvariablen und physische E/A der Steuerung wählen, bestimmt ein Bewertungssystem die zu paarenden Variablen und physischen E/A, basierend auf Datentypkompatibilität und Ähnlichkeit der Namen.
Unterstützte Variablen
Simulation
- Verhalten eines Boolean, Integer und Real Signals von Komponenten in der 3D-Welt.
- Die digitalen Ein- und Ausgabe-Signale (Ports) des Roboters in der 3D-Welt. Die E/A des Roboters sind Verhalten der Boolesch-Signal-Zuordnung, die vom Ausführenden seines Programms referenziert werden. Der Roboter muss einer Stäubli-Steuerung zugeordnet sein, und den E/A-Ports müssen entweder eine Aktion oder die Verbindung zu einem Signal zugeordnet sein. Ansonsten werden der Roboter und/oder die ungebrauchten Ports im E/A-Zuordnungs-Editor weder aufgelistet noch zur Verfügung gestellt.
Steuerung
- Physische Ein- und Ausgaben der Stäubli-Steuerung, die in VAL 3 Anwendungen verwendet werden, indem sie mit speziellen Variablen verknüpft werden, und zwar aio und dio. Analoge Eingaben/Inputs (ain) und Ausgaben/Outputs (aout) haben den Datentyp aio. Digitale Eingaben/Inputs (din) und Ausgaben/Outputs (dout) haben den Datentyp dio.
Hinweis: Auf Programmvariablen kann nicht direkt vom Stäubli Add-On aus zugegriffen werden.