Yaskawa Roboteranschluss
Über das Plugin
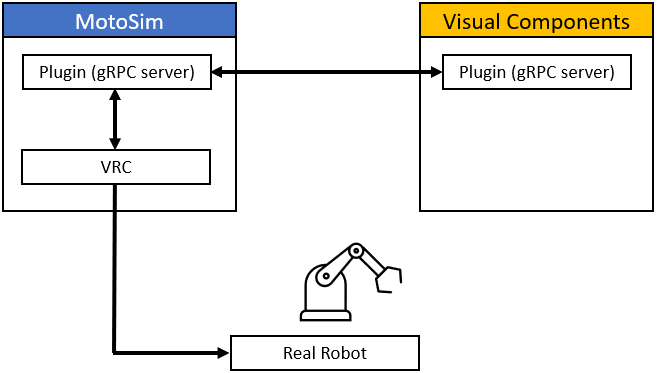
Der Anschluss unterstützt eine direkte Verbindung zu einem virtuellen Yaskawa-Roboter-Controller (VRC), der in MotoSim läuft. Eine Verbindung zu einem echten Roboter wird über eine Netzwerkverbindung in MotoSim hergestellt. MotoSim und Visual Components laufen in der Regel auf demselben Computer. Es ist jedoch möglich, Visual Components auf einem Computer auszuführen und eine Verbindung mit der IP-Adresse eines anderen Computers herzustellen, auf dem MotoSim läuft.
Der Anschluss unterstützt die folgenden Aktionen:
- Verbindung zu einem oder mehreren Yaskawa-Robotern gleichzeitig.
- Lesen von Gelenkwerten.
- Lesen von externen Eingaben, externen Ausgaben und Programmvariablen.
- Schreiben von externen Eingaben und Programmvariablen.
Begriffe
- API — Anwendungsprogrammschnittstelle (Application Program Interface).
- gRPC — Framework für entfernten Prozeduraufruf (Remote Procedure Call).
- IO — Eingabe/Ausgabe (Input/Output).
- JBI — Programmdateien für die Yaskawa/Motoman-Robotersteuerung.
- MotoSim — Yaskawa MotoSim EG-VRC (Enhanced Graphics Virtual Robot Controller) Simulationssoftware.
- SLURBT — Begriffe, mit denen Yaskawa/Motoman der Einfachheit halber jede Achse des Roboters beschreiben. Die Definition jedes Wertes lautet wie folgt:
- S-Achse: Drehbasis (Swivel Base)
- L-Achse: Unterer Arm (Lower Arm)
- U-Achse: Oberer Arm (Upper Arm)
- R-Achse: Armrolle (Arm Roll)
- B-Achse: Handgelenkbeugung (Wrist Bend)
- T-Achse: Werkzeugflansch (Tool Flange)
- E-Achse: Externe Achse oder siebte Achse (External Axis or Seventh Axis)
- VRC — Virtueller Roboter-Controller (Virtual Robot Controller)
- YRC1000 — Yaskawa-Controller-Plattform
Anforderungen
Die Verbindung erfordert Visual Components Premium 4.9 und das MotoSim-Plugin, das unter visualcomponents.com/downloads verfügbar ist.
Einrichtung
Hinweis: Sehen Sie sich zusätzlich zu den folgenden Einrichtungsinformationen die Video-Lektion (auf Englisch) auf der Visual Components Academy an.
In Bezug auf die Technologie wird ein MotoSim-Plugin verwendet, um mit Visual Components zu kommunizieren. Die Verbindung verwendet die MotoSim VRC-API, die von Yaskawa und gRPC erstellt wurde. Daher muss MotoSim eine Verbindung mit einem Roboter herstellen.
Das MotoSim-Plugin installieren
Um das Yaskawa MotoSim-Plugin zu installieren, führen Sie das Installationsprogramm aus.
Um das Yaskawa MotoSim-Plugin zu deinstallieren, führen Sie das Deinstallationsprogramm aus, das unter folgendem Pfad verfügbar ist:
C:\Users\Public\Documents\MOTOMAN\MotoSimEG-VRC\Plugins\x64\uninstaller.exe
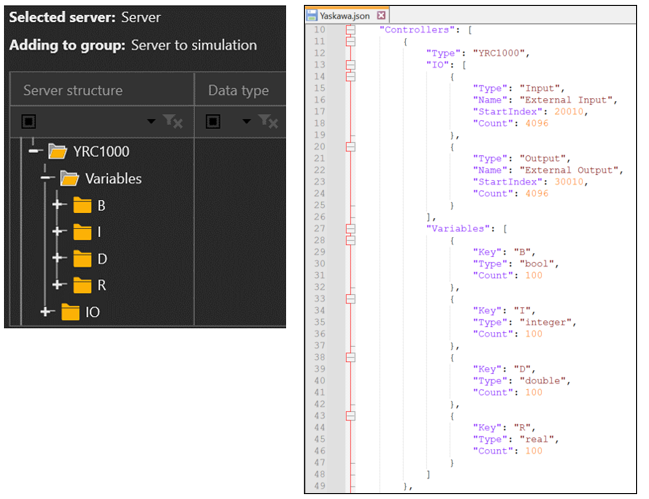
Das Plugin wird zum Plugins-Ordner Ihrer öffentlichen MotoSim-Dokumente hinzugefügt und enthält eine Yaskawa.json-Konfigurationsdatei, die zur Identifizierung der I/O und Variablen eines Yaskawa-Controllers verwendet wird, zum Beispiel YRC1000.
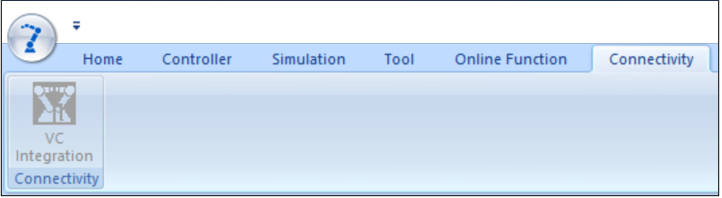
Nach der Installation des Plugins starten Sie bitte MotoSim und bestätigen, dass das Plugin auf der Registerkarte Konnektivität verfügbar ist.
Verwenden des MotoSim-Plugins
Öffnen Sie Ihr MotoSim-Projekt. Verwenden Sie dann das MotoSim-Plugin, um eine Port-Nummer zu definieren und die Verbindung herzustellen. Sie können Visual Components jetzt mit den Robotern in Ihrem Projekt verbinden.
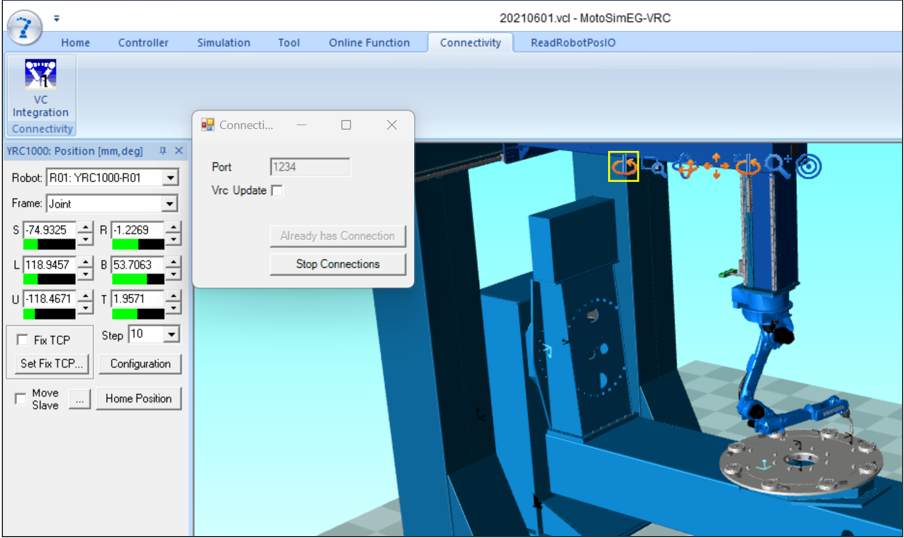
Hinweis: In den meisten Fällen wird empfohlen, die Eigenschaft Vrc Update deaktiviert zu lassen, insbesondere wenn MotoSim mit einem echten Roboter verbunden ist.
Verbindung zum Roboter herstellen
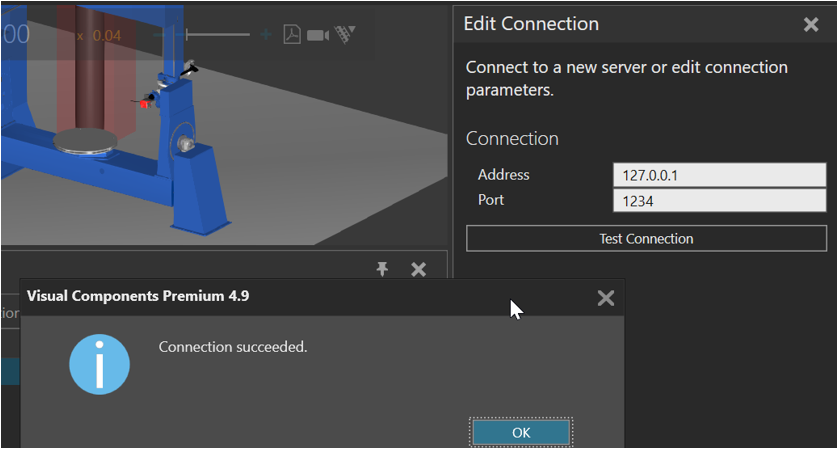
Wenn Sie eine Verbindung zu einem Roboter herstellen, verwenden Sie die richtige IP-Adresse und Port-Nummer.
Variablen zuordnen
Die Ordner Bewegung, IO und Variablen enthalten für jeden verbundenen Roboter die Variablen für Gelenkwerte, IO und Variablen, die in Yaskawa-Programmen verwendet werden.
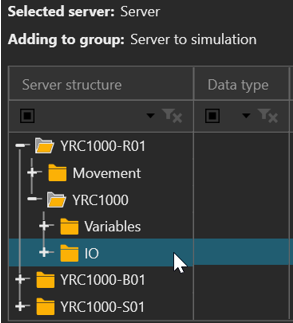
Die verfügbaren IO- und Programm-Variablen basieren auf dem verbundenen Roboter und seines Controllers, die in der Yaskawa.json-Konfigurationsdatei definiert sind. Nehmen Sie die für Ihre Projekte erforderlichen Änderungen an der Konfigurationsdatei vor.
Kompatibilität
Über Bewegungsvariablen
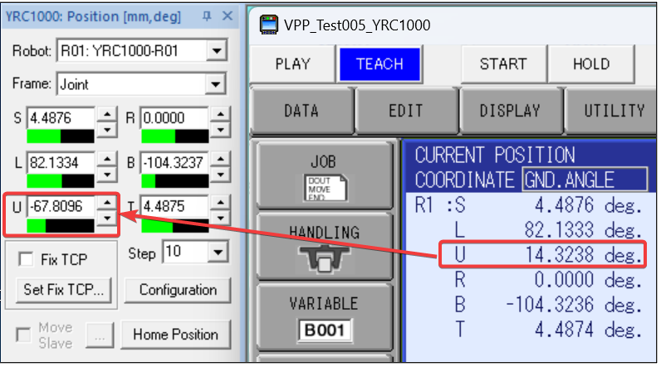
In MotoSim v2022 gibt es ein bekanntes Problem, bei dem die Gelenkwerte des Controllers nicht den Gelenkwerten im Positionsfenster entsprechen. Die Roboter in Visual Components sind so modelliert, dass sie Controller-Werte berücksichtigen. Daher stimmen die Roboterbewegungen in Ihren Visual Components-Projekten möglicherweise nicht mit denen in MotoSim überein, da die Gelenkwerte aus MotoSim gelesen werden.
Die Komponente MotoSim Joint Converter im eCatalog ist ein Werkzeug, das Sie als Workaround für dieses Problem verwenden können.
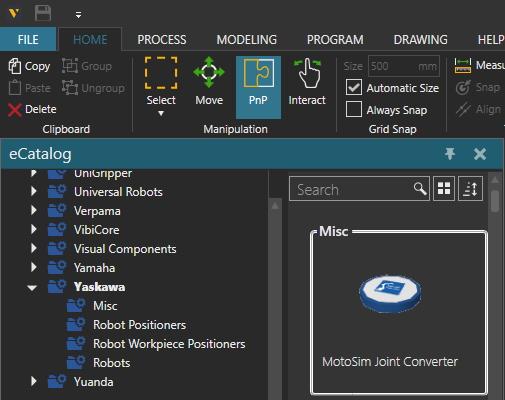
Verbinden Sie den Roboter zunächst mithilfe des Werkzeugs Schnittstellen in Visual Components per Fernzugriff mit der Komponente MotoSim Joint Converter in Ihrem Layout.
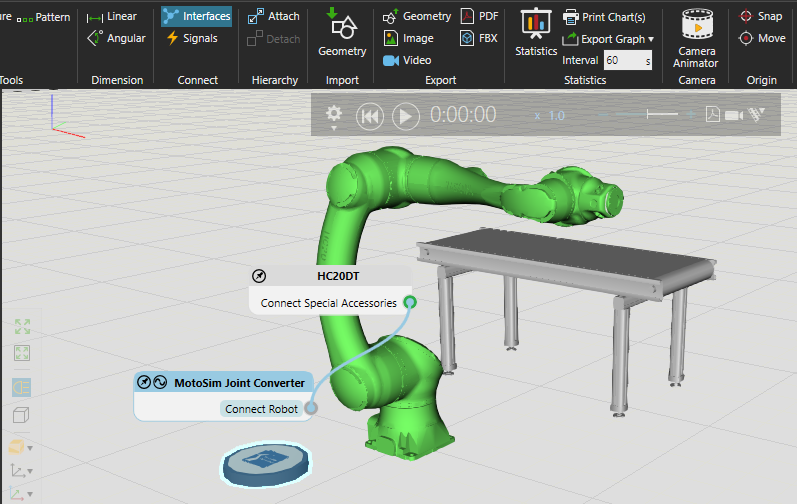
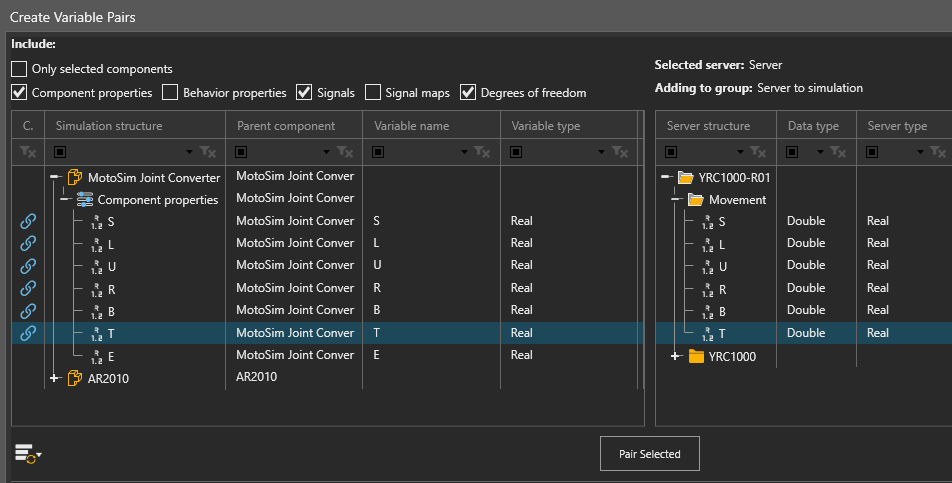
Ordnen Sie als Nächstes die Bewegungsvariablen des angeschlossenen Yaskawa-Controllers den SLURBT-Eigenschaften der Komponente MotoSim Joint Converter zu.
Nachbearbeitung des Roboterprogramms
Postprozessor
Wenn Sie Roboterprogramme von Ihrem Visual Components-Modell auf den nativen Controller übersetzen müssen, können Sie den Postprozessor verwenden.
Hinweis: Der Postprozessor ist in den folgenden Produkten verfügbar:
- Visual Components Premium
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
Weitere Informationen zur Nachbearbeitung mit einem Visual Components OLP-Produkt finden Sie unter Roboterprogramm übersetzen.
Um das Roboterprogramm für die echte Robotersteuerung zu übersetzen:
- Klicken Sie auf den Roboter (oder ein anderes Gerät), dessen Programm Sie übersetzen möchten.
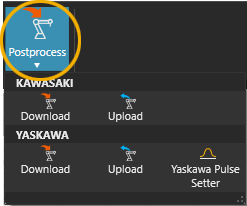
- Klicken Sie auf Nachbearbeiten in PROGRAMM Werkzeuge der Multifunktionsleiste.
- Klicken Sie auf Herunterladen unter dem richtigen Markennamen des Roboters.
- Wählen Sie den Ordner, in dem Sie die Programmdatei speichern möchten und geben einen Namen für die Datei ein.
-
Klicken Sie auf Speichern
Die Datei kann an die Robotersteuerung übertragen werden
Hinweis: Führen Sie bei echten Robotern nur die Roboterprogramme aus, die anhand von kalibrierten Modellen übersetzt wurden. Andernfalls kann es bei der Ausführung des Programms zu unvorhersehbaren Kollisionen und Fehlern kommen.
Yaskawa-Puls-Einstellung
Die Yaskawa-Puls-Einstellung wird benötigt, um die Pulskennzahlen an einem Yaskawa-Robotermodell einzustellen. Standardmäßig werden Roboterpositionen in JBI-Programmen als Pulswerte definiert. Daher erfordert das Simulationsmodell die richtigen Pulskennzahlen.
Hinweis: Die Yaskawa-Pulse-Einstellung ist in den folgenden Produkten erhältlich:
- Visual Components Premium
- Visual Components Premium OLP
- Visual Components Professional OLP
Weitere Informationen finden Sie in den markenspezifischen Handbüchern für Visual Components Robotics OLP-Roboter im Visual Components OLP Extranet.