Kawasaki Robot Connector
Note: Only the English language version of Kawasaki K-ROSET is supported.
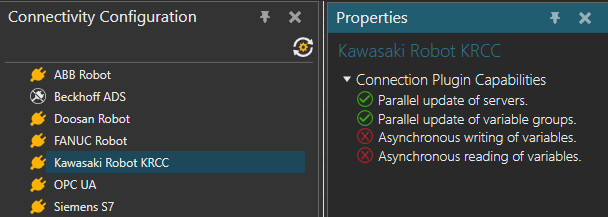
About the plugin
The connector supports a direct connection to a Kawasaki robot controller. This includes a physical as well as a virtual controller.
Terminology
- KRCC (Kawasaki Robot Control Class Library).
- IO (Input/Output).
Requirements
The connection requires Visual Components Premium 4.9.
Setup
Note: In addition to the setup information below, refer to the video lesson (in English) on the Visual Components Academy.
The connector supports the following actions:
- Connection to one or more Kawasaki robots at a time.
- Reading of joint values.
- Reading of inputs and outputs.
- Writing outputs.
In terms of technology, the KRCC library made by Kawasaki is used for communication.
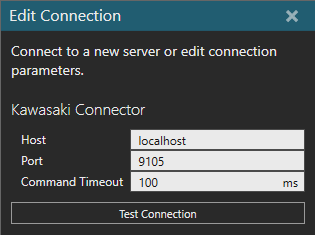
Connecting to Robot
When connecting to a robot, use the correct IP address and port number. By default, the KRCC uses port 9105, 9205, 9305 etc for each connection, but check the correct port number to use when connecting to a real robot.
Mapping variables
The Movement and IO folders for each connected robot, contain the variables for joint values and IO. The available IO is based on the connected robot. The IO ranges adhere to Kawasaki specification, for example 1-32 for outputs and 1001-1032 for inputs.

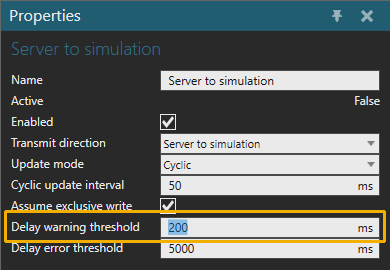
Recommendations
It has been observed with a virtual controller, that the update rate for communication can exceed on average 50ms, especially when the robot is idle. To avoid warning messages and logging of this behavior, consider using a higher Delay warning threshold in the variable group.
Post Processing the Robot Program
Postprocessor
If you need to translate robot programs from your Visual Components model to the native controller, you can use the Postprocessor.
Note: The Postprocessor is available in the following products:
- Visual Components Premium
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
For more information on postprocessing using a Visual Components OLP product, see Translate robot program.
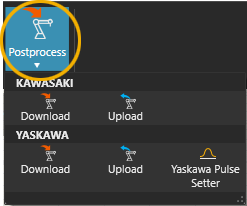
To translate the robot program for the real robot controller:
- Click the robot (or another device) which program you want to translate.
- Click Postprocess from PROGRAM ribbon tools.
- Click Download under the correct robot brand name.
- Browse the folder where you want to save the program file and give name for the file.
-
Click Save.
The file can be transferred to the robot controller
Note: In real robots, run only the robot programs that are translated from calibrated models. Otherwise, there can be unpredictable collisions and errors when executing the program.
For more information check the Visual Components Robotics OLP robot brand specific manuals on the Visual Components OLP Extranet.