Create an Auto Search
NOTE: This topic is only applicable to the following Robotics OLP products:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
The Auto Search functionality generates the Searches for the weld automatically.

- Click on the weld statement for which you wish to create the search.
- Click on the Auto search option from the Statements toolbar in the Program Editor.
- The searches will be automatically generated, along with the proper allocation of memory locations to the weld.
- If you wish to change any parameters of the automatically generated searches, you may click on the search statement and use the Path setup tab and tweak any of the needed parameters. For e.g. you can repick the search by going to Path setup tab, or change the search type to 1-D or 2-D etc.
- By default, the software generates 2 searches, at the beginning and end of the weld. The user has the control to define how the auto-search function should generate the searches by going to the settings tab.
Changing the Default Settings of the Auto- Search function
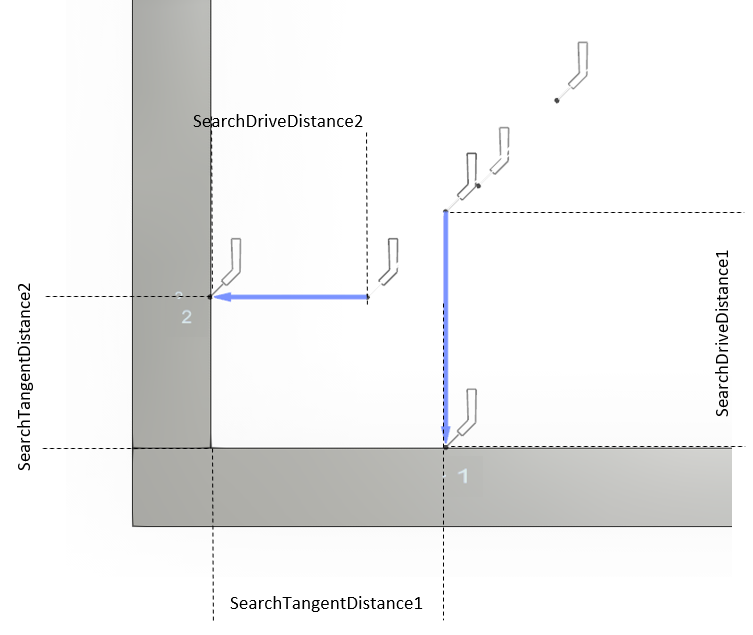
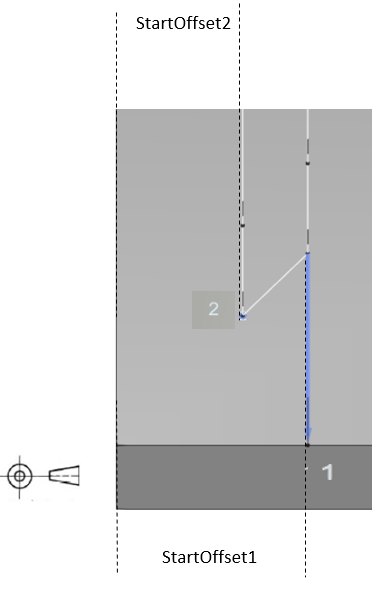
Click on the Robot > Click on Settings from the Program ribbon bar > Select the Auto-Search Tab. Here, you can find the default parameters for the Auto-search function that you may change as needed. The below table describes each of these parameters.
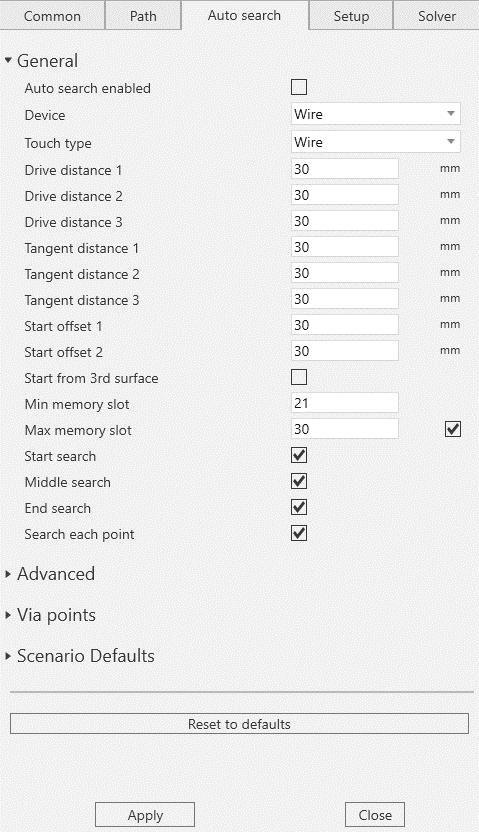
After making the necessary changes to the parameters, hit apply. Now, each time the Auto-search function is used the software will use the settings you have defined here in the settings tab. For.e.g. if you have unchecked the Middle & End search, it will generate search only at the beginning of the weld.
Auto-search advanced settings are covered in Auto-Search Advanced Settings.