External axis motion
NOTE: This topic is only applicable to the following Robotics OLP products:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
External axis motion statement allows you to move servo joints that are not controlled synchronously by the robot.
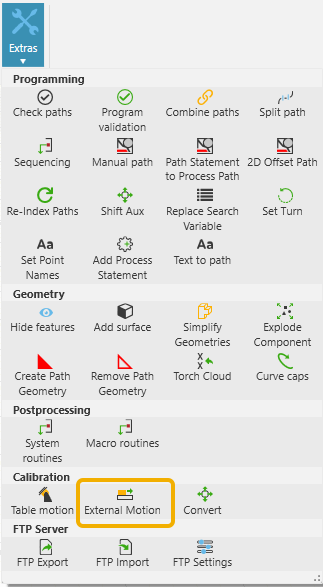
To enable this behaviour, you need to assign the component with the servo joints with an Executor behaviour, which is linked to the desired servo- or robot controller. After this, create a subroutine for the component that contains the External Motion statement.
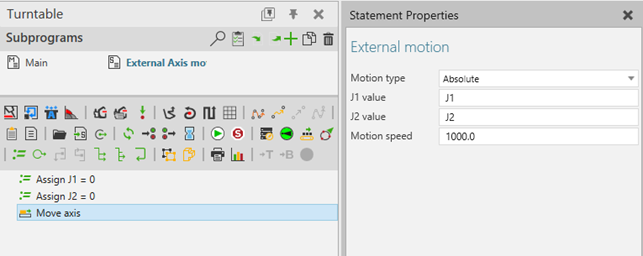
Statement itself explained below:
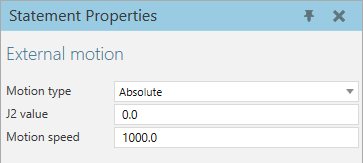
Motion type: Absolute or Incremental
Joint Value: Value for the joint, float number or a numeric variable
Motion speed: Joint movement speed
When joints are controlled with variables, define the variables for the subroutine that is called from the robot that controls the motion.
There is currently no limit for the number of joints assigned to the servo controller.
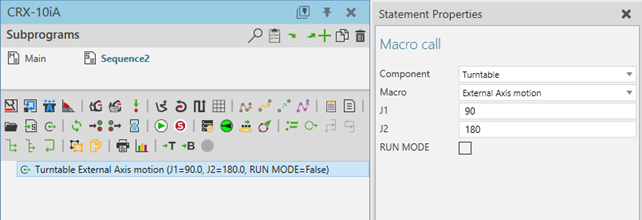
To control the joints, use the Macro call command to call for the component subroutine that includes the External axis motion statement with motion target values or with variables that are assigned with the desired positions. Assing target values for joints and run the macro under the main controller to see the simulation.