プログラム編集
プログラム編集パネルではロボットプログラムの表示と編集、 モーションのプレビューやRSLステートメントを使用したその他のタイプのコンポーネントのプログラムができます。
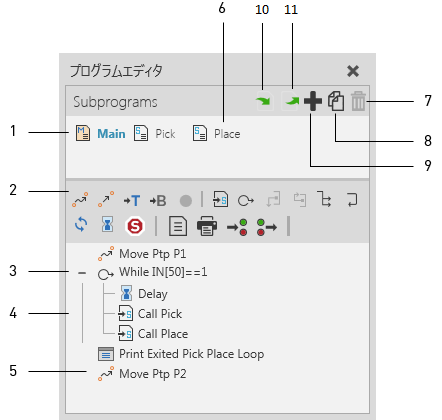
| 1. | メインルーチン |
| 2. | ステートメントツールバー |
| 3. | 条件付きステートメント |
| 4. | ネストされたステートメント |
| 5. | モーションタイプステートメント |
| 6. | サブルーチン |
| 7. | 選択したルーチンを削除 |
| 8. | 選択したルーチンを複製 |
| 9. | サブルーチンを追加 |
| 10. |
プログラムをインポート |
| 11. |
プログラムをエクスポート |
ステートメントツールバー
ステートメントツールバーは3Dワールドで追加するRSLステートメントのためのコマンドを 選択したロボットのプログラムに表示します。
| 名称 | 説明 |
| ブレーク | ループの実行を終了します。 |
| コールシーケンス | プログラム内で特定のサブルーチンを実行します。 |
| コメント | プログラム内でコメントを残します。 |
| 続行 | 次の反復から継続するループを設定します。 |
| ベース定義 | ロボットでベースフレームのプロパティを設定します。 |
| ツール定義 | ロボットでツールフレームのプロパティを設定します。 |
| 遅延 | プログラムの実行を遅らせます。 |
| 停止 | プログラムの実行を停止します。 |
| If | コンディションがTrueの場合 ステートメントの1グループ、もしくはFalseの場合他のステートメント のグループでif-then-elseのコンディションを定義します。 |
| ジョイントモーション | ジョイント値を補間することによりポジションへの ポイントツーポイントモーションを実行します。 |
| リニアモーション | 現在のコンフィグに基づいたポジションへリニアモーションを実行します。 |
| 印刷 | 出力パネルで印刷するフィードバックを送信します。 |
| プログラム同期 | 一致する同期メッセージを使用してその他のプログラム可能なコンポーネントと共に プログラム実行を同期します。 |
| リターン | ルーチンの実行を終了します。 |
| バイナリ出力設定 | ロボット出力に接続されたデジタルシグナルの値を設定したり ロボットのアクションを通知します。 |
| タッチアップ | 選択されたロボットポジションのモーションステートメントのプロパティを 更新します。 |
| バイナリ入力を待機 | ロボット入力に接続されたデジタルシグナルが 特定の値に到達するのを待機します。 |
| 期間 | ループ中ステートメントのグループの実行のコンディションを 定義します。 |
プログラム
ロボットのプログラムとそのジョブはレイアウト内のロボットで保存されます。 プログラム内のステートメントを再配置する必要がある場合、 他のステートメントの前または後にステートメントをドラッグアンドドロップしてください。ステートメントを挿入する位置は どのレベルでステートメントを挿入するのかを同時に示すラインで表示されます 。
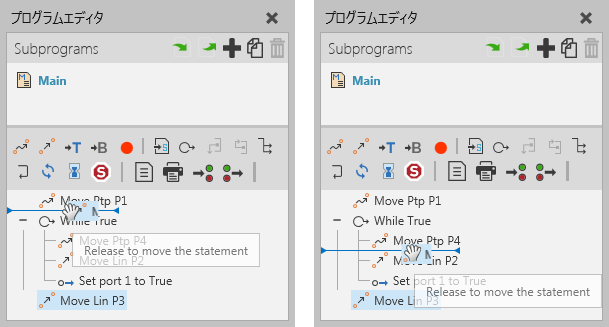
シミュレーションを実行すると、ロボットプログラムで実行されている現在のステートメントは、右側の矢印で示されます プログラムエディタパネル。
