用于运动控制器的程序编辑器
注意: 本主题介绍用于运行在运动控制器上的机器人所使用的全新程序编辑器。如果您正在对使用传统机器人控制器的机器人进行编程,请参阅 程序编辑器。
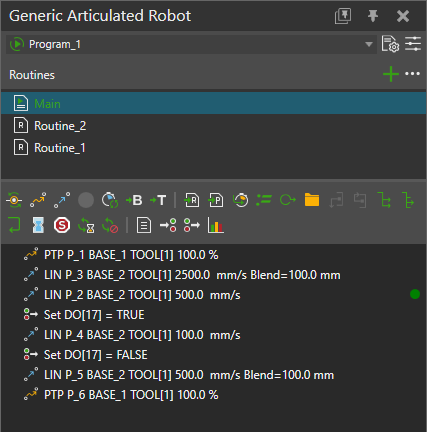
程序编辑器面板允许您查看和编辑机器人程序、预览运动,并使用 RSL 语句对其他类型的组件进行编程。
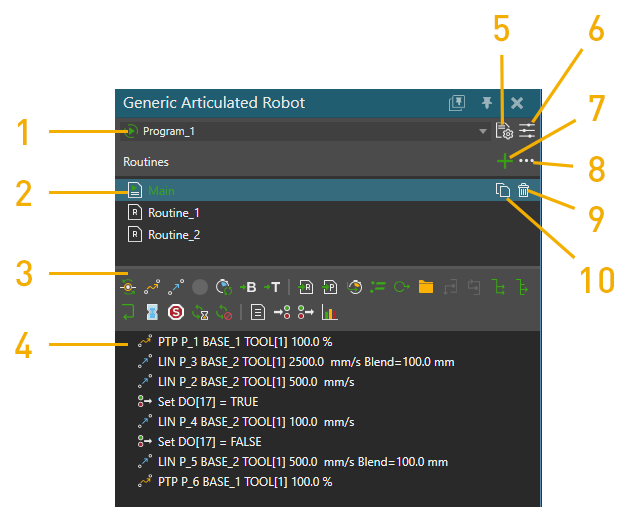
- 当前程序。程序名称前的绿色三角形图标表示程序处于激活状态,并将在仿真启动时运行。
- 例行程序列表。例行程序图标中的绿色三角形表示该例行程序被设为主例行程序,它将在仿真启动时开始运行。
- 语句工具栏
- 机器人程序/语句列表
- 打开 程序管理器
- 打开程序属性
- 添加例行程序
- 例行程序选项
- 删除例行程序
- 创建例行程序副本
语句工具栏
语句工具栏显示用于向 3D 世界中选定机器人添加 RSL 语句的命令。
| 名称 | 描述 |
| 赋值语句 | 为变量赋值。 |
| Break 语句 | 结束循环的执行。 |
| 取消程序同步语句 | 使先前设置的同步 ID 失效。 |
| 调用程序语句 | 执行指定的程序。 |
| 调用例行程序语句 | 执行程序中指定的子例行程序。 |
| 注释语句 | 在程序中添加注释。 |
| Continue 语句 | 使循环从下一次迭代继续执行。 |
| 创建组语句 | 创建语句组。 |
| 定义基坐标系语句 | 设置机器人中基坐标系的属性。 |
| 定义工具坐标系语句 | 设置机器人中工具坐标系的属性。 |
| 延时语句 | 延迟程序执行。 |
| 停止语句 | 停止程序执行。 |
| If 语句 | 定义 if-then-else 条件:若条件为 True 执行某组语句,若为 False 则执行另一组语句。 |
| 关节运动语句 | 通过将各轴移动到目标值来执行关节运动。 |
| LIN 语句 | 基于当前构型执行到指定位置的直线运动。 |
| 运动同步语句 | 在两个或多个执行器之间同步运动。 |
| PTP 语句 | 执行点到点(Point-to-Point)运动,机器人通过插补关节值到达目标位置。 |
| 程序同步语句 | 使用匹配的同步消息与其他可编程组件同步程序执行。 |
| 返回语句 | 结束例行程序的执行。 |
| 设置二进制输出语句 | 设置连接到机器人输出的数字信号的值,或用于触发机器人动作。 |
| 设置状态语句 | 设置机器的统计状态。 |
| Switch Case 语句 | 基于条件表达式的计算结果执行预定义 case 范围中的一个。 |
| 示教(Touch-up) | 更新选定机器人位置的运动语句属性。 |
| 等待异步语句 | 等待异步语句执行完成。 |
| 等待二进制输入语句 | 等待连接到机器人输入的数字信号达到特定值。 |
| While 语句 | 定义在循环中执行的语句组的条件。 |
程序
机器人的程序与机器人一起保存在布局中。程序可以包含多个例行程序,其中一个被设置为主例行程序。仿真开始时,主例行程序将开始运行。
如果您需要重新排列程序中的语句,可将语句拖放到另一条语句之前或之后。插入位置会显示为一条线,并指示语句被插入的层级。
当运行仿真时,当前正在执行的语句会在程序编辑器面板右侧以绿色圆点标记。