Path tab
NOTE: This topic is only applicable to the following Robotics OLP products:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
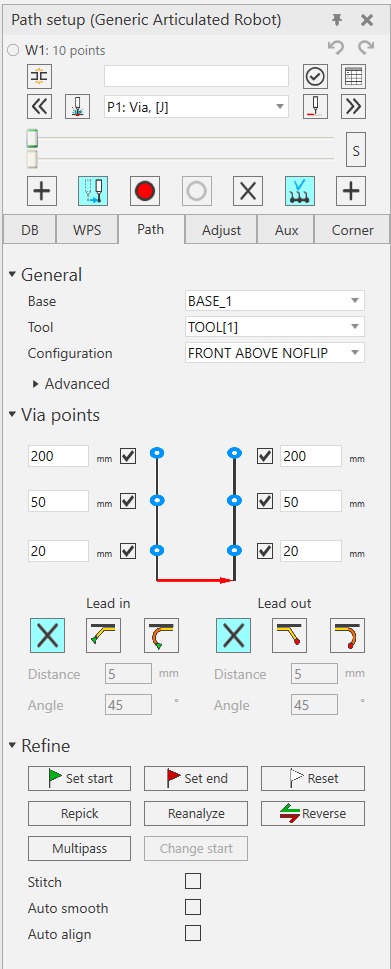
General
- Base: Robot base used in the path
- Sync base: To enable the Synchro base for Yaskawa, Fanuc robot brands, tick this box.
- Tool: Robot tool used in the path
- Configuration: Robot configuration used in the path. Determines how the robot joints are calculated when moving to points. Configuration is usually 0 for floor mounted robots and 1 for ceiling mounted robots. (Configuration names depends on the robot brand)
- Work piece: Select and lock the needed workpiece for welding if there exist multiple workpieces.
Via points
- Via, approach, near, away, departure, via points: These points can be taken away from path by unchecking. The distance to next point (when approaching weld) or from previous point (when departing from weld) can be modified.
- Lead in: An approach distance or diameter with certain angle can be given to the cutting tool at the beginning of the cut operation.
- Lead out: Similar function like lead in but applies during the end of the cut operation.
- Click the Cross icon to lock the values set under Lead in/Lead out function.
Refine
- Set start: Set weld start to current point
- Set end: Set weld end to current point
- Reset: Reset end and/or start point to original position
- Repick: Repick the weld path from 3D world
- Renalyze: Renalayze the weld path by topology analysis
- Reverse: Reverse the weld path (change direction to the opposite)
- Multipass: Make a multipass weld from the selected weld (opens the multipass interface, see Multipass weld)
- Change start: Change the start point to the current point on a path that forms a closed loop (start and end points are the same)
- Stitch: Enables stitch welding ON for the path (intermittent welding)
- Auto smooth: Smooths the wire roll based on the first and the last point in the path
- Auto align: Smooths the wire roll based on the first point in the path