路径选项卡
注意: 本主题仅适用于以下 Robotics OLP 产品:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
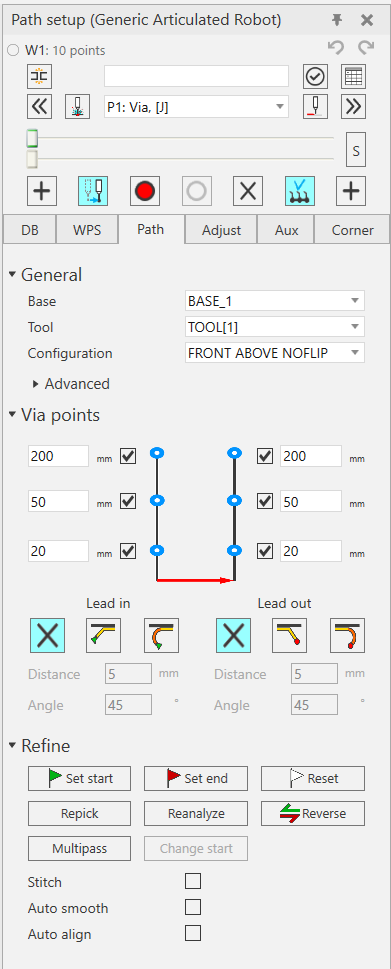
概述
- 底座:路径中使用的机器人底座
- 同步底座:要启用安川、发那科机器人品牌的同步底座,请勾选该复选框。
- 工具:路径中使用的机器人工具
- 配置: 路径中使用的机器人配置。决定机器人关节移动到点时如何计算。通常,对于落地式机器人,配置为 0,对于吸顶式机器人,配置为 1。(配置名称取决于机器人品牌)
- 工件:如果存在多个工件,请选择并锁定需要焊接的工件。
过孔点
- 通过点、接近点、靠近点、远离点、出发点、过孔点:可以通过取消选中将这些点从路径中删除。可以修改到下一点的距离(接近焊缝时)或到上一点的距离(离开焊缝时)。
- 导入:在切割操作开始时,可以给切割工具提供一定角度的接近距离或直径。
- 导出:与导入功能类似,但在切割操作结束时使用。
- 单击 Cross 图标可锁定在“导入/导出”功能下设置的值。
精细
- 设置起点:将焊接起点设置为当前点
- 设置终点: 将焊接终点设置为当前点
- 重置: 将终点和/或起点重置为原始位置
- 重新选择: 从 3D 世界中重新选择焊接路径
- 重新分析:通过拓扑分析重新分析焊接路径
- 反向:逆转焊接路径(将方向改为相反方向)
- 多道焊接:在所选焊缝上进行多道焊接(打开多道焊接界面,参见多道焊)
- 更改起点:在形成闭合回路的路径上,将起点改为当前点(起点和终点相同)
- 点焊:为路径启用点焊(间歇焊接)
- 自动平滑:根据路径上的第一点和最后一点平滑焊丝
- 自动对齐:根据路径中的第一点平滑焊丝