“设置”选项卡
注意: 本主题仅适用于以下 Robotics OLP 产品:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
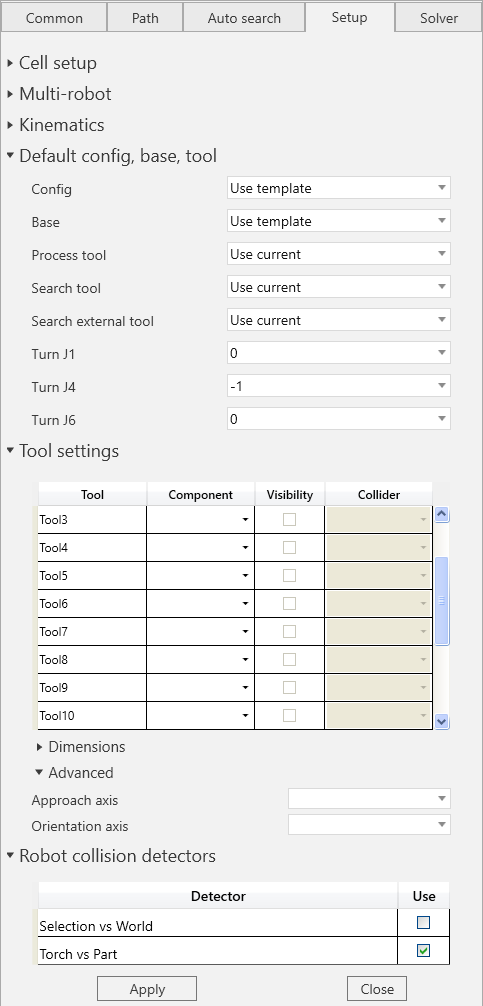
单元设置:机器人单元中的活动组件
- 机器人作为 WPP:在设置中将机器人用作工件定位器
-
运行设置:设置组件的类别和属性
(需要在单元建模完成后运行)
多机器人:
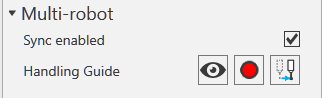
勾选“启用同步”选项后,即可在同步模式下使用 2 台或更多机器人。您可以利用操作指南按钮隐藏、保存操作指南并移动其位置。
- 可见范围:通过开启或关闭此选项来设置操作指南的可见范围
- 调整:调整操作指南的默认位置
- 跳转至:点击此按钮将操作指南移至其默认位置
默认配置、基础、工具:设置默认配置、基础、加工程序工具和搜索工具。
- 默认转弯值:必要时,可以为机器人的 J1/J4/J6 轴设置默认转弯值。例如,已知某个转弯值最适合路径,尤其是考虑到布线的复杂性,可以使用此值。
工具设置:如果布局中包含多个焊枪,可以使用此设置根据您在创建路径时选择的工具编号查看所需的焊枪。
例如,从组件下拉菜单中,将正确的 CAD 几何图形分配给相应的工具索引。
-
尺寸:使用喷嘴进行触摸传感时,应在相应字段中设置喷嘴的尺寸。测量说明如下所示。
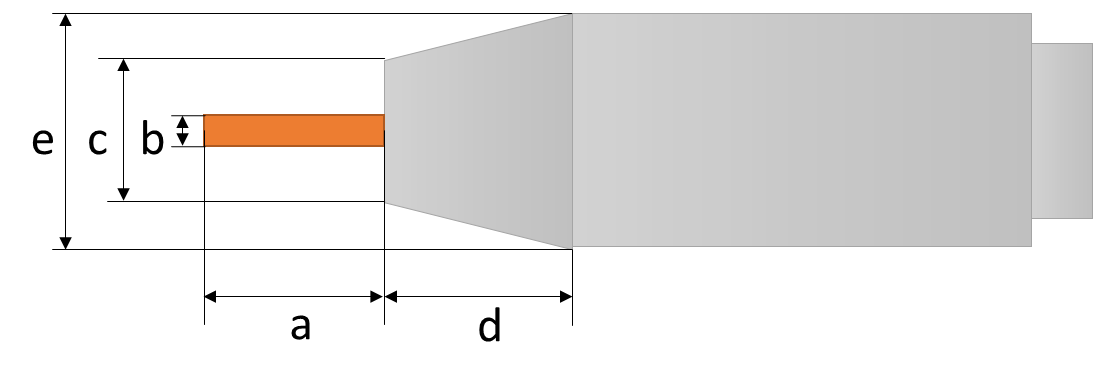
a = 气嘴到焊丝的长度
b = 焊丝直径
c = 焊枪直径
d = 肩部距离
e = 肩部直径
-
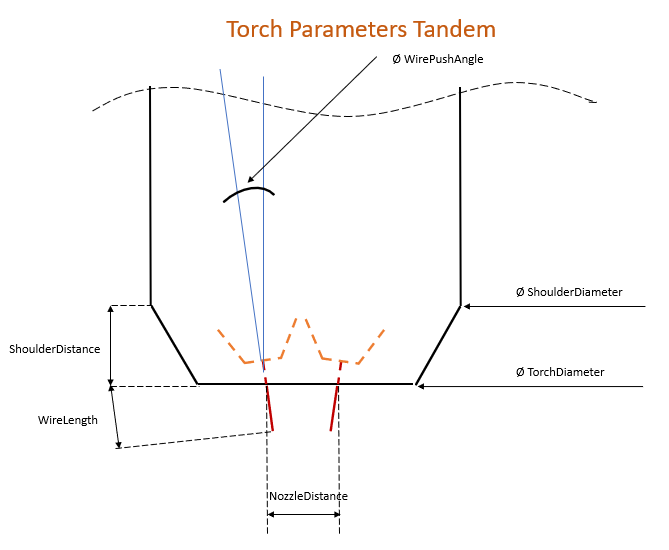
串联焊枪尺寸:使用串联焊枪进行触摸传感时,需要在相应字段中设置串联焊枪喷嘴的尺寸。
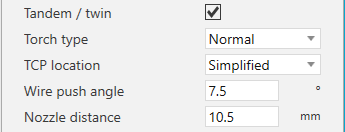
WirePushAngle = 喷嘴内部焊丝的角度
NozzleDistance = 喷嘴尖端之间的距离
焊枪类型 = ["Normal", "Rotated"]焊丝的对齐方式,“Normal”表示焊丝在同一直线上
TCP 位置 = ["Aligned with Wire", "Simplified"]
“Aligned with Wire”表示 TCP 位于每根焊丝的末端,并与焊丝对齐;“Simplified”表示串联焊枪只有一个 TCP,位于焊丝之间,未与焊丝对齐(即 TCP 的 Z 轴指向喷嘴的朝向)。
高级:可在此处设置刀具的默认进刀轴和方向轴。

机器人碰撞检测器:检测器启用之后,将由路径检查中描述的路径检查器使用。如果勾选 WP,则选中的焊接和搜索语句的工件会自动添加到检测器的 B 列表中。