路径检查
注意: 本主题仅适用于以下 Robotics OLP 产品:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
路径检查功能可用于验证机器人程序。它还可以在语句之间插入机器人的动作。您可以从其他 和 路径设置中打开面板。路径检查器不支持以下特殊情况:多机器人系统、在编程期间更改工具或工件的几何形状、独立移动转台。
要使用碰撞检测功能,首先需要使用A列表中的机器人和工具创建一个碰撞检测器。然后必须在机器人设置中选择碰撞检测器,请参阅“设置”选项卡。

- 运行路径检查器,上下条纹显示路径沿线的路径状态。上条纹显示运动学问题,下条纹显示碰撞问题:
- 绿色: 一切都很好
- 灰色:由于附近存在可达性问题,无法检查该区域
- 橙色:目标无法到达
- 紫色:线性运动期间TCP旋转超过180°
- 红色:已超过关节限制
- 蓝色:奇异性问题
- 黄色:碰撞
-
打开路径检查器设置窗口:
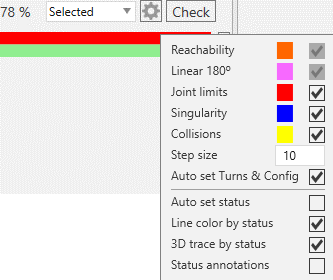
- 语句:您可以检查整个程序、当前序列或选定的语句
- 如果要检查关节限制、奇异性问题和碰撞,请切换
- 步长:插值的精度
- 每次线性插值后,自动设置转数和配置总是尝试猜测正确的转数和配置。
- 自动设置状态:请参阅 自动设置状态
- 运行检查后,会显示插值步骤中有多大部分没有问题。
- 拖动图钉可沿选中路径移动机器人。
- 点击向左和向右箭头按钮,可转到与当前步骤状态不同的上一个或下一个插值步骤。
- 颜色显示当前插值步骤的状态。
-
文本解释了当前步骤的状态,并显示了相关的序列名称和语句。
注意:您可以通过点击文本在程序树中选择语句。
-
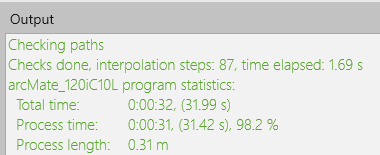
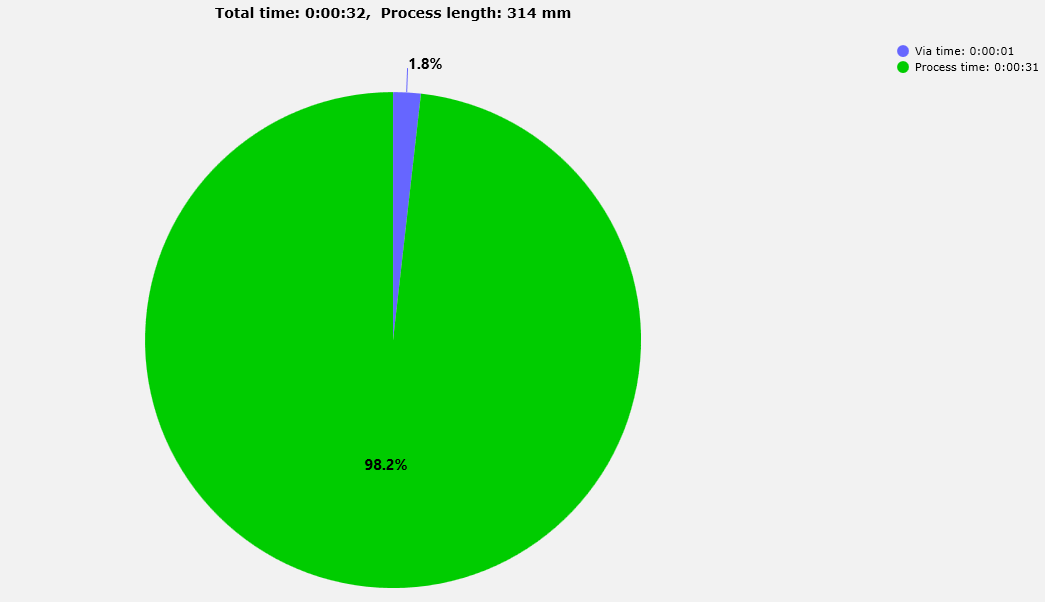
显示统计图:显示焊接过程的统计数据。点击此选项可查看饼图,显示通过时间和处理时间以及关于总时间和处理长度(mm)的信息。
您还可以在输出选项卡中查看此信息,如下所示: