モーションコントローラ用プログラムエディタ
注意: 本トピックでは、モーションコントローラ上で動作するロボット向けの新しい
プログラムエディタについて説明します。従来のロボットコントローラを使用するロボットをプログラムする場合は、
プログラム編集を参照してください。
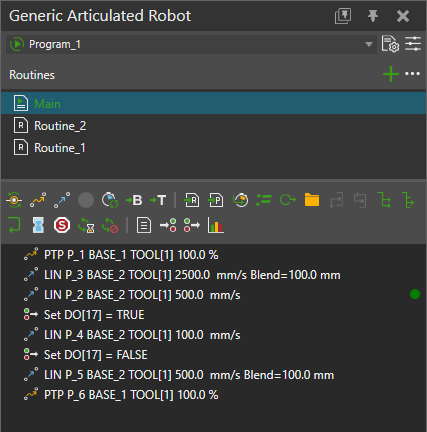
プログラムエディタパネルでは、ロボットプログラムの表示と編集、動作のプレビュー、さらに RSL ステートメントを使用した他コンポーネントのプログラミングができます。
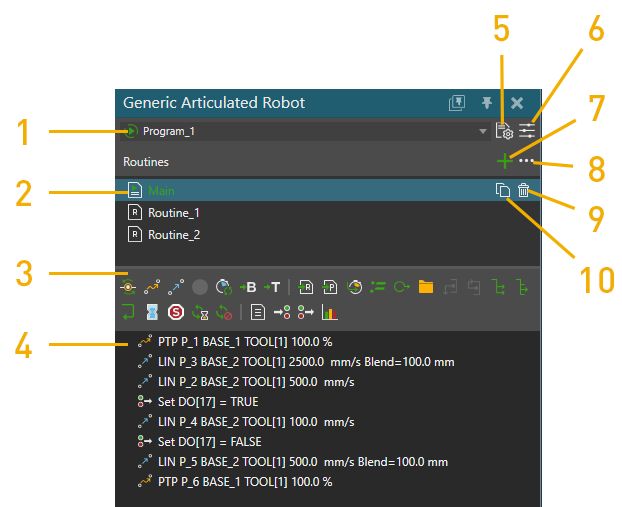
- 現在のプログラム。プログラム名の前に緑の三角アイコンが表示されている場合、そのプログラムはアクティブであり、シミュレーション開始時に実行されます。
- ルーチン一覧。ルーチンのシンボルに緑の三角アイコンが表示されている場合、そのルーチンがメインルーチンとして設定されており、シミュレーション開始時に実行されます。
- ステートメントツールバー
- ロボットプログラム/ステートメント一覧
- プログラムマネージャを開く
- プログラムプロパティを開く
- ルーチンを追加
- ルーチンオプション
- ルーチンを削除
- ルーチンのコピーを作成
ステートメントツールバー
ステートメントツールバーには、3D ワールド内で選択したロボットのプログラムに RSL ステートメントを追加するためのコマンドが表示されます。
| 名称 | 説明 |
| 変数代入ステートメント | 変数に値を代入します。 |
| Break ステートメント | ループの実行を終了します。 |
| プログラム同期解除ステートメント | 以前に設定された Sync ID を無効化します。 |
| プログラム呼び出しステートメント | 指定したプログラムを実行します。 |
| ルーチン呼び出しステートメント | プログラム内の指定したサブルーチンを実行します。 |
| コメントステートメント | プログラム内にコメントを残します。 |
| Continue ステートメント | ループを次の反復から継続させます。 |
| グループ作成ステートメント | ステートメントグループを作成します。 |
| ベース定義ステートメント | ロボットのベースフレームのプロパティを設定します。 |
| ツール定義ステートメント | ロボットのツールフレームのプロパティを設定します。 |
| 遅延ステートメント | プログラムの実行を遅延します。 |
| Halt ステートメント | プログラムの実行を停止します。 |
| If ステートメント | 条件が True の場合と False の場合で異なるステートメントグループを実行します。 |
| Joint ステートメント | 各軸を目標値へ移動させるジョイント動作を実行します。 |
| LIN ステートメント | 現在の構成に基づいて線形動作を実行します。 |
| モーション同期ステートメント | 複数のエグゼキュータ間で動作を同期します。 |
| PTP ステートメント | ポイントツーポイント動作を実行し、ロボットが関節値を補間して位置に到達します。 |
| プログラム同期ステートメント | 同期メッセージを利用して、他のプログラム可能なコンポーネントとプログラム実行を同期します。 |
| Return ステートメント | ルーチンの実行を終了します。 |
| バイナリ出力設定ステートメント | ロボット出力に接続されたデジタル信号の値を設定する、またはロボットにアクションを指示します。 |
| ステート設定ステートメント | 機械の統計ステートを設定します。 |
| Switch Case ステートメント | 条件式の評価値に基づき、事前に定義されたケーススコープのいずれかを実行します。 |
| ティーチング(タッチアップ) | 選択されたロボット位置に基づき、動作ステートメントのプロパティを更新します。 |
| 非同期待機ステートメント | 非同期ステートメントの完了を待機します。 |
| バイナリ入力待機ステートメント | ロボット入力に接続されたデジタル信号が指定値に達するまで待機します。 |
| While ステートメント | ループ内でステートメントグループを実行する条件を定義します。 |
プログラム
ロボットのプログラムはレイアウト内のロボットと共に保存されます。プログラムには複数のルーチンを含めることができ、そのうち 1 つがメインルーチンとして設定されます。シミュレーション開始時、メインルーチンが実行を開始します。
プログラム内のステートメントを並べ替える必要がある場合、ステートメントをドラッグ&ドロップし、別のステートメントの前後に配置します。挿入位置は線で表示され、どの階層に挿入するかも示されます。
シミュレーション実行中、ロボットプログラムで現在実行されているステートメントは、プログラムエディタパネル右側の緑の点で示されます。