Testpfad
HINWEIS: Dieses Thema gilt nur für die folgenden Robotik-OLP-Produkte:
- Visual Components Premium OLP
- Visual Components Professional OLP
- Visual Components Robotics OLP
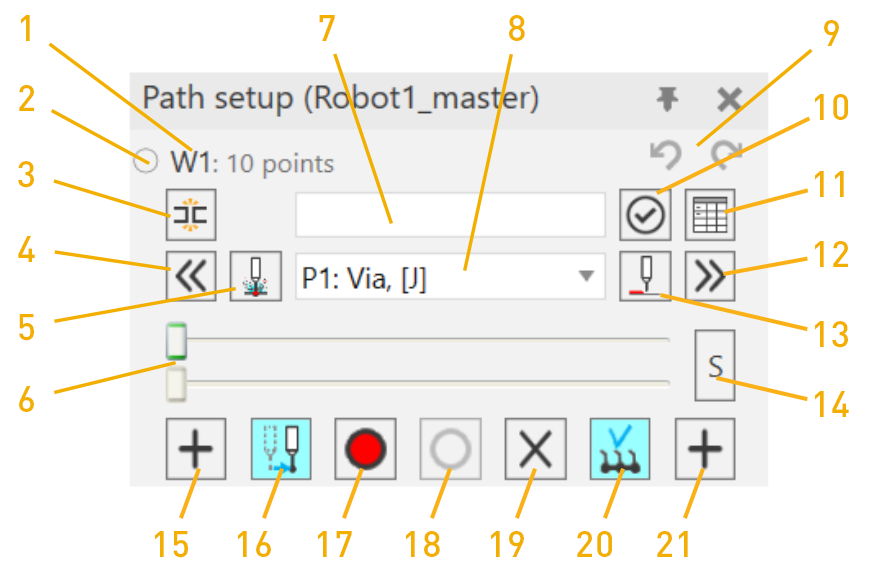
Im Abschnitt Testpfad kann der Benutzer den Schweißpfad nach der Erstellung des Pfads validieren und die Punktänderungen vornehmen. Der Roboter kann im 3D-Fenster an jedem Punkt des Schweißpfads in der Vorschau angezeigt werden.
|
|
Name | Beschreibung | |
|
1 |
Nummer des Pfads | Nummer des Schweißpfads. | |
|
2 |
Programmstatus |
Stellen Sie den Programmstatus ein. Weitere Informationen finden Sie unter Programmstatus . |
|
|
3 |
Werkzeuglöser |
Passen Sie die Werkzeugwinkel und -versätze automatisch an, um zu verhindern, dass das Roboterwerkzeug mit dem Werkstück kollidiert, sodass der Pfad im Modus „Vollständige Änderung“ bleibt. Weitere Informationen finden Sie unter Werkzeuglöser . |
|
|
4 |
Springt zum ersten Punkt |
Springt zum ersten Punkt im Schweißpfad. |
|
|
5 |
Zum Schweißbeginn springen |
Springt zu dem Punkt, an dem das Schweißen beginnt. |
|
|
6 |
Schieberegler |
Schieberegler zum Navigieren zwischen Punkten auf dem Schweißpfad. |
|
|
7 |
Name des Pfades | Name des Schweißpfads. | |
|
8 |
Aktueller Punkt |
Aktueller aktiver Punkt. Der aktive Punkt kann über das Dropdown-Menü ODER durch Aktivieren des Feldes und Bildlauf mit der Maus geändert werden. |
|
|
9 |
Rückgängig/Wiederherstellen |
Die Option Rückgängig/Wiederherstellen für Pfadänderungen ermöglicht das Rückgängigmachen aller Änderungen, die am aktuellen Pfad vorgenommen wurden, und das Wiederherstellen aller rückgängig gemachten Aktionen. Schaltflächen werden aktiv, nachdem Änderungen am Pfad vorgenommen wurden oder wenn eine Aktion rückgängig gemacht wird. |
|
|
10 |
Pfadüberprüfung |
Öffnen Sie das Bedienfeld „Pfadprüfung“, siehe Pfadprüfung für weitere Informationen. |
|
|
11 |
Punktsteuerung |
Öffnen Sie das Bedienfeld „Punktsteuerung“, siehe Punktsteuerung für weitere Informationen. |
|
|
12 |
Springt zum letzten Punkt |
Springt zum letzten Punkt im Schweißpfad. |
|
|
13 |
Springt zum Schweißende |
Springt zu dem Punkt, an dem das Schweißen endet. |
|
|
14 |
Schieberegler-Interpolator |
Klicken Sie auf die Option S (wird blau), um den Roboter mit dem Schieberegler sanft durch den Zwischenweg zwischen zwei Punkten zu bewegen. |
Deaktivieren Sie die Option S durch Klicken (wird grau), um den Roboter mit dem Schieberegler nur von Punkt zu Punkt zu bewegen und nicht auf dem Zwischenweg. |
|
15 |
Punkt davor hinzufügen |
Fügt einen neuen Punkt vor dem aktuellen hinzu. |
|
|
16 |
Roboter zum Punkt springen |
Bewegt den Roboter an den ausgewählten Punkt im Simulationsfenster |
|
|
17 |
Nachbessern |
Nachbessern der aktuellen TCP-Position und Ausrichtung auf den aktiven Punkt. Um den Punkt zu verschieben, bewegen Sie den Roboter in die gewünschte Position und bessern Sie nach. |
|
|
18 |
Nachbessern rückgängig machen |
Machen Sie das Nachbessern am aktiven Punkt rückgängig. |
|
|
19 |
Punkt löschen |
Löscht den aktiven Punkt |
|
|
20 |
Vollmodus |
Wendet die Pfadparameter sofort auf alle Punkte im Pfad an, wenn sie auf den verschiedenen Registerkarten in der Pfadkonfiguration geändert werden. |
|
|
Einzelmodus |
Wendet Pfadparameter auf einen ausgewählten Punkt im Pfad an. |
||
|
Multimodus |
Wendet Pfadparameter auf alle Punkte im Pfad an, mit Ausnahme des Punktes, der mit der Option Einzelpunktänderung geändert wurde. |
||
|
21 |
Punkt dahinter einfügen |
Fügt einen neuen Punkt nach dem aktuellen hinzu. |
|


Hinweis: Fügen Sie Punkte hinzu oder löschen Sie sie oder nehmen Sie Nachbesserungen vor, nachdem Sie alle Einstellungen auf den Registerkarten für die Pfadeinstellungen geändert haben. Andernfalls wird bei einer Änderung der Einstellungen, z. B. nach einer Nachbesserung, der Pfad neu erstellt und die Punktänderungen (z. B. die Nachbesserung) werden gelöscht.